
Release notes for the Genode OS Framework 22.11
With version 22.11, we pursued two new exploratory topics as we envisioned on the project's road map for this year, namely the use of the framework for hardware-software co-design work, and principally enabling suspend/resume functionality on PCs.
A decade ago, we explored the combination of Genode with FPGA technology for the first time. Our interest in this direction got reignited two years ago when we started enabling Genode on a board based on the Xilinx Zynq, which combines an ARMv7 SoC with FPGA fabric. This line of work eventually culminated in new development work flows for creating hardware IP cores and Genode components in tandem. Section Hardware-software co-design with Genode on Xilinx Zynq covers the results of this line of work.
The second largely exploratory topic is the practical use of sleep states on PC hardware, which - until this point - remained rather mysterious to us. Section Low-level mechanism for suspend/resume on PC platforms reports on our findings and the forthcoming integration of this feature into Genode.
Besides the exploration work, the profound enhancement of our Intel GPU multiplexer stands out. As detailed in Section Hardware-accelerated graphics with Intel GEN12+ GPUs, the new version supports up-to-date GEN12+ GPUs, comes with numerous robustness and performance improvements, and got adapted to Genode's new uniform driver infrastructure.
The latter point brings us to the most elaborate development under the hood of the framework, which is the great unification of the device-driver interfaces across all supported architectures. Section Uniform use of new platform-driver interface wraps up this intensive line of work, which left no PC-related driver unturned.
A recurring theme throughout this year is the use of Genode on the PinePhone. The current release is no exception. Sections Emerging Sculpt OS variant for the PinePhone and PinePhone drivers for audio, camera, and power control report on the progress at the user-facing side as well as the driver-related achievements digging deep into the realms of power management, audio, and the camera.
Among the many further topics of the current release are virtualization on PC and ARM (Sections ARM virtual machine monitor and Seoul VMM), plenty of device-driver improvements, and enhanced tooling that makes the framework ever more enjoyable to use (Section Build system and tools).
Hardware-software co-design with Genode on Xilinx Zynq
A distinct feature of the Xilinx Zynq-7000 SoC is the combination of its Cortex-A9 CPU with an FPGA, which is also referred to as programmable logic. As the name suggests, the FPGA can be programmed with custom hardware designs and thus act as an accelerator, DSP, or an arbitrary peripheral device. The Zynq platform thereby accommodates a playground for hardware-software co-design for a comparably low budget.
While extending the platform support for the Zynq in general, we have particularly been working towards establishing the required infrastructure for supporting hardware-software co-design in Genode. With this release, we can draw an almost complete picture of such a co-design workflow in Genode. Our achievements culminate in a beginner-level tutorial for the Zybo Z7 board.
Runtime reconfiguration of the FPGA
A key component to FPGA runtime reconfiguration in Genode is the drivers_fpga-zynq subsystem that we already introduced with release 22.05.
This subsystem enabled bitstream loading at runtime in order to reprogram the FPGA. In conjunction with the Zynq Driver Manager, it allowed launching/stopping of device drivers in accordance with the availability of the devices implemented on the FPGA.
For this release, we reworked this subsystem in order to support switching between several bitstreams. In particular, we added a devices manager to merge the static devices ROM with a bitstream-dependent set of devices. The latter is specified by the component's configuration as follows:
<config>
<bitstream name="my_bitstream.bit">
<devices>
<device name="my_device" type="my_type">
<io_mem address="0x43c00000" size="0x1000"/>
</device>
</devices>
</bitstream>
</config>
The configuration comprises an arbitrary number of bitstream nodes with a mandatory name attribute. Each bitstream node may contain a set of device specifications as expected by the platform driver. The devices manager merges the static devices ROM with the devices of the currently loaded bitstream, which is reported by the fpga_drv component. The result is then consumed by the platform driver. The bitstream to be loaded is specified by the configuration of the fpga_drv as follows:
<config> <bitstream name="my_bitstream.bit"/> </config>
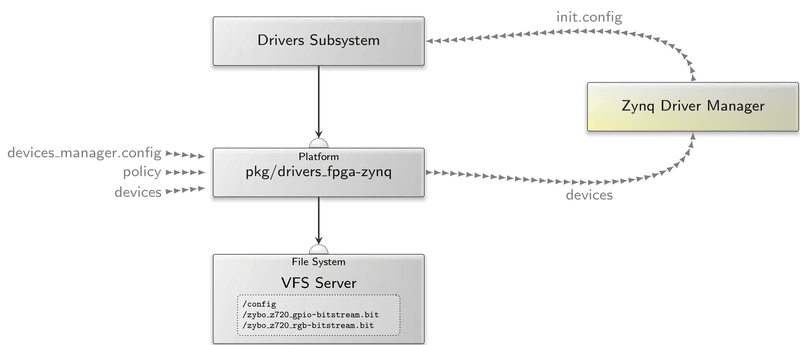
These changes are bundled into the new drivers_fpga-zynq subsystem. The figure below illustrates how this subsystem is used as a replacement for the platform driver.
|
Just as the standard platform driver, the subsystem expects a policy and devices ROM. In addition, we must provide it with a devices_manager.config ROM as shown above. The bitstreams as well as the configuration for the internal fpga_drv component must be provided via a file system session.
In addition to these changes to the drivers_fpga-zynq subsystem, we added configurability of the four FPGA clocks ("fpga0" to "fpga3") to the Zynq platform driver. Moreover, we added four equally named reset domains.
All changes are found in the genode-zynq repository.
Packaging of bitstreams with Goa
Custom hardware designs for the Zynq SoC are created with Xilinx Vivado. In order to simplify reproducing a bitstream from its sources and creating corresponding depot archives, we added Vivado as a supported build system to Goa. In particular, we leveraged the fact that a hardware project can be exported from Vivado as a tcl script that reproduces the project. With this approach, we only need to keep the custom source files and omit any generated glue code.
In addition, we added support for auto-generating a devices_manager.config from a hardware design. When provided with a sparse devices file (mentioning the name or type of each device), Goa tries to extract the corresponding MMIO addresses and clock rates from the design and adds a corresponding devices_manager.config to the depot archive.
Please find detailed instructions in the Goa documentation via
$ goa help build-systems
Pin driver and co-design tutorial
Following the lead of the Allwinner SoC, we implemented a pin driver for the Zynq platform. Since GPIO on the Zynq may require loading of a custom bitstream in case the FPGA's I/O pins are used, we developed and published a tutorial for the Zybo Z7 board. This tutorial showcases a co-design workflow demonstrating the use of the pin driver, custom hardware design with Xilinx Vivado, bitstream generation and packaging with Goa as well as bitstream switching at runtime. You can find the tutorial on the new Genode channel on hackster.io.
Hardware-accelerated graphics with Intel GEN12+ GPUs
With our big Mesa 3D library update from version 11.2.2 to version 21.0.0, we also switched the Intel graphics back end from the dated DRI2/i965 to the Gallium/Iris based graphics driver. The reason for doing so is becoming apparent with the current Genode release. The old i965 driver does not support newer Intel Graphics hardware and is limited to (U)HD graphics devices found, for example, on Broadwell, Skylake, or Kabylake platforms. The new Intel Xe (eXascale for everyone = GEN12) hardware is only supported by the Iris driver and can be found on current architectures like Tigerlake or Alderlake. Intel Xe comes with a completely new instruction set architecture (ISA). Thanks to our switch to Iris, most of these ISA changes are handled transparently by the Mesa library for us. The main task for Genode was to adjust our Intel GPU multiplexer to the new graphics-device generation.
Intel GPU-GEN12 multiplexer adjustments
Genode's GPU multiplexer is a very low level component within the 3D graphics stack. Technically, it handles the GPU resources (like graphics memory) and the scheduling and execution of compiled GPU code (i.e., batch buffers) of the graphics device. It is also responsible for providing separation of different GPU clients, which is achieved by GPU contexts with a separate page table per client in hardware. Also, it serves interrupts and informs the clients, respectively the 3D applications, about progress so a client can submit the next rendering request. For Intel Xe, there are only two changes within this low level ISA. First, the interrupt handling registers have been improved. It has become easier to distinguish, for example, between a display-engine interrupt and a rendering interrupt. Since graphics cards can have many interrupt causes, this is a useful and welcome change. Second, it is now possible to schedule 16 instead of 4 jobs onto the GPU. While we don't take advantage of this feature yet - we schedule one job at a time - this may come in handy for use cases like 3D compositing. Additionally, the multiplexer has to provide information about slices, subslices, and EUs (Execution Units) to Mesa clients.
Stability and resource improvements
Resources need to be traded on Genode, and it is essential that the GPU multiplexer does not pay for memory allocations or capability upgrades from its own budget. The client has to donate these resources beforehand. If this rule is violated, the multiplexer might run out of budget and stall all clients. Because 3D applications can require a huge amount of resources, this has been a challenging topic during the last release cycle, and we are glad to announce that even sophisticated workloads are now running well on Genode. There is still room for improvement, but the current situation is already reassuring. Stability-wise, we have tested the updated 3D stack with various workloads (games, browsers, VirtualBox6-3D) and did fix all issues that we came across.
Base framework and OS-level infrastructure
Base API changes
New Dictionary utility
Throughout the Genode code base, there are several places where objects are accessed by using a name as key. To avoid the repeated manual crafting of such data structures, we introduced a basic Dictionary data structure located at base/include/util/dictionary.h.
It follows the patterns of the existing Id_space and Registry. That is, elements are automatically added to the dictionary at construction time, respectively removed at destruction time. There exists a with_element method for applying a functor to one element by specifying a name as key, and a with_any_element method that can be used to destruct all dictionary items.
Tightening the Xml_node interface
The former with_sub_node method has been renamed to with_optional_sub_node to better reflect the intention of the caller. If no sub node of the specified type exists, the specified functor is not executed.
Use cases where a sub node is mandatory are best covered by the new with_sub_node method that takes two functors as arguments, one called with the matching sub node, and one that is called if no such sub node exists.
NIC router
The NIC router now generates reports triggered by internal events (re-configuration, link state change, etc.) asynchronously. This has the benefit that the potentially expensive report update does not delay the event processing that triggered the update and that a report is guaranteed to reflect a consistent state of the router's internals.
Furthermore, if the <report> attribute link_state_triggers is set, the router now updates the report also whenever a network session gets constructed or destructed. This is definitely necessary with sessions whose link state is "up" because we should consider a non-existent session to be "down". However, in real-world scenarios, a subscriber might want to know about the construction and destruction of sessions that are "down" as well because one has to be able to synchronize the lifetime of local objects that keep track of the link states.
Besides the polishing of the report functionality, there are some improvements related to the DHCP processing in the router. First, the router is now robust against invalid DNS addresses in DHCP ACK packets. Next, the DHCP client doesn't produce oversized Ethernet packets anymore. This is important in networks with a low bandwidth. Then, the link state of a session that is bound to the state of another domain via the <dhcp-server> attribute dns_config_from is now correctly synchronized to whether that domain has an IP configuration or not. And, last but not least, the DHCP server now accepts the optimized startup sequence of clients like Debian that store their lease persistently and directly try re-requesting it on boot-up (no DHCP DISCOVER). These last two changes both prevent DHCP re-attempts that could cause a significantly delayed network boot-up at applications behind the router.
Improved support for time-multiplexed GPIO pins
Prompted by the need to enable a bit-banging I2C driver on the PinePhone, we extended Genode's pin-driver framework introduced in version 21.11 with support for the time-multiplexed operation of a pin as output or input.
To operate a pin in both directions, a driver obtains both a pin-state and a pin-control session for the same pin. The pin-state session can be used to sense the current pin state. The control session allows the client to set the pin to high or low (using the state method), or to set it to high-impedance via the yield method. Once switched to high-impedance, the pin can be used as input.
Libraries and applications
Emerging Sculpt OS variant for the PinePhone
Genode on the PinePhone has come a long way, most of which is covered by the Genode Platforms document. Device-driver work accounts for the majority of the effort, which is nicely wrapped up with the current release as described in Section PinePhone drivers for audio, camera, and power control. With the fundamental device drivers for the PinePhone covered, we can now turn our attention to system-integration work, ultimately raising the question of how a Genode-based phone should best present itself to the user.
|
|
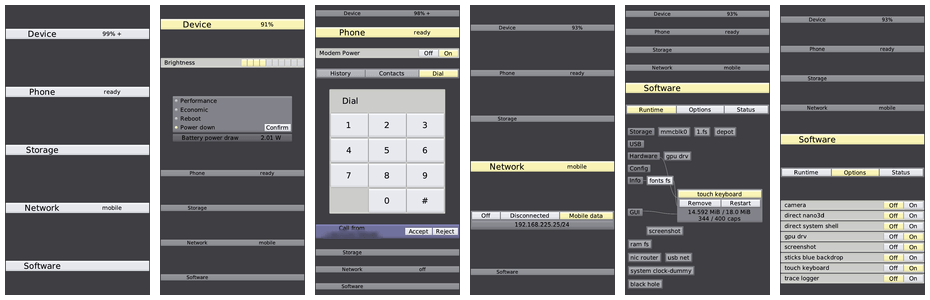
The forthcoming phone variant of the user interface of Sculpt OS.
|
We take this question as an opportunity for exploration. Similarly to how the so-called Leitzentrale of Sculpt OS provides the user with an administrative view on the system that is separate from the user-defined desktop runtime, we pursued the division of the phone's UI into two faces that can be toggled with a simple touch gesture. The first one accommodates the role of the device as a fixed-function appliance similar to the functionality of a feature phone whereas the second one can be shaped entirely by the user. The screenshots above give a glimpse of the user interface of the appliance side. It covers low-level device parameters, voice calls, establishing network connectivity, and the installation and management of the software running on the user-defined side. One can see several cues from Sculpt OS such as the component graph.
The clear-cut separation of the two roles of the device opens up new ways to leverage Genode's component architecture. For example, observing that the appliance role needs only a subset of components, we can orchestrate the startup of the system such that those components are started first. This way, the device's basic functions like voice calls become available in under 7 seconds when powering-on the device.
Regarding the built-in feature set, we implemented the fundamental device functions that everyone takes for granted, like displaying the battery state, triggering the charging when a charger gets connected, controlling the brightness of the display, or powering down the device.
The phone variant of Sculpt OS evolves in the genode-allwinner repository, specifically within the sculpt/ and src/app/phone_manager/ directories. It can be built via the following command:
build/arm_v8a$ make run/sculpt KERNEL=hw BOARD=pinephone SCULPT=phone
For loading the system on the PinePhone, please follow the instructions given in the following article.
- Booting Genode on the PinePhone
-
https://genodians.org/nfeske/2021-09-20-pine-fun-pinephone-boot
Note that the current version is still at a rather developer-focused stage. To avoid testimonies of a prematurely released version, we decided to postpone the release of a ready-to-use image until the feature set generally expected from a phone is complete and well tested.
ARM virtual machine monitor
The hardware-assisted virtual machine monitor (VMM) for ARM developed for Genode is part of the framework since release 15.02. Over the years, it got extended to support recent ARMv8 hardware, VirtIO device models for console, network, block, and so on. Nevertheless, the given device models, memory dimensions, and Linux specifics like initramfs size remained hard-coded within the VMM component, and not easily configurable.
Now, the VMM accepts a configuration that enables one to define various aspects of the virtual machine and guest OS. The VMM is still focused on Linux OS guests though. Formerly, a pre-compiled flattened device-tree binary (DTB) was used by the VMM to boot the Linux guest. The new version of the VMM generates the DTB based on its own configuration.
An example configuration looks like the following:
<config kernel_rom="linux"
initrd_rom="initrd"
ram_size="512M"
cpu_count="4"
cpu_type="arm,cortex-a53"
gic_version="3"
bootargs="console=hvc0">
<virtio_device name="hvc0" type="console"/>
<virtio_device name="eth0" type="net"/>
<virtio_device name="hd0" type="block"/>
</config>
The RAM size and CPU count attributes are mandatory. All other attributes are optional and use default values. However, it is noteworthy that you should use the correct values for the CPU type and the Generic Interrupt Controller (GIC) version that matches your underlying hardware. Due to the usage of hardware-dependent virtualization extensions, the VMM and guest OS should see the correct hardware description for CPU and interrupt controller.
Seoul VMM
The Seoul/Vancouver VMM - introduced to Genode with release 11.11 - is an x86 based VMM which runs on Genode@NOVA, Genode@seL4, and Genode@Fiasco.OC on Intel and on AMD hardware. It is used with 32-bit Linux VMs typically.
Over the last and this year, the VMM got VirtIO support with the goal to improve the usability when used day-to-day, e.g., on Sculpt OS. Given the observation that most Linux guests come readily (or easy to install) equipped with VirtIO driver support, we can avoid fiddling with building or integrating guest drivers manually. The Seoul VMM got extended by implementations for the VirtIO input device model, VirtIO GPU device model (2D by now) and VirtIO audio device model.
With the new input model, absolute mouse positions are supported, so that the mouse pointer positions in Genode's Sculpt OS and in the guest VM can be kept in sync. Beforehand, it was hardly possible when solely using the PS/2 model using relative motion vectors. With the new 2D GPU model, the mouse pointer shape of the guest VM can be exported and shown by Genode's GUI multiplexer instead of the native mouse pointer, which improves the visual impression and avoids confusion. Additionally, with the new GPU model, resizeable and arbitrary resolution dimension are possible, which was not feasible with the former VGA/VESA model. The overall painting overhead is more manageable since partial updates are supported by the device model. The VirtIO audio model enables playback of music when streaming & surfing in the VM, which was beforehand not possible because no audio model was available. The new VirtIO models of the Seoul VMM were finally mapped to Genode's GUI, input and audio-out session interfaces.
Combined, the new device models improve the overall usability when using Seoul on Sculpt OS. Several packages of alex-ab's depot are available to get started, ranging from a full on target Debian installation over pre-packed and ready to use VMs to up-to-date Firefox and Thunderbird VMs based on Tiny Core Linux. Whereas the Firefox VM is entirely disposable - as mentioned in https://genodians.org/alex-ab/2019-03-06-disposal-browser-vm - the Thunderbird VM relies on persistent storage.
Device drivers
Uniform use of new platform-driver interface
In release 22.02, Genode's generic platform API for all architectures got introduced and the x86-specific platform API got deprecated. However, at that point, all x86-based device drivers still used the deprecated API and the deprecated platform driver. With this release, all device drivers are now reworked to use the generic platform API, and driver. The deprecated platform driver and API have been removed.
To make all previous scenarios work again, several changes were necessary. The changes - especially concerning the pci_decode and platform_drv components - are described in the following.
PCI decoder
The PCI decoder, introduced in release 22.05, consumes ACPI information delivered by the ACPI driver and additional platform information from the core component. It uses this information to find and scan PCI buses for devices and their capabilities. Finally, it creates a report about all PCI devices found.
While using more and more device drivers with the generic platform driver and PCI decoder, we realized that on some platforms, not all PCI bridges are necessarily enabled, which leaves the devices behind such a bridge unusable. This is now fixed by enabling all PCI bridges.
The information about reserved memory regions for PCI devices is already used in the boot process, e.g., memory for video graphic cards is discovered by the ACPI driver. However, the PCI decoder did not yet offer this information in its devices report. Therefore, the platform driver did not know about the reserved memory, and could not set up an IOMMU appropriately. From now on, the PCI decoder reports such memory regions as follows.
<device name="00:02.0" type="pci"> ... <reserved_memory address="0xdd000000" size="0x2800000"/> </device>
The PCI memory Base Address Registers (BARs) provide information about pre-fetchable memory. This information is now additionally exported by the PCI decoder and can be used by the platform driver (see the next section for details). The information is presented in the following form:
<device name="00:02.0" type="pci"> ... <io_mem pci_bar="2" address="0xe0000000" size="0x10000000" prefetchable="true"/> </device>
Currently, the PCI decoder decides about the type of interrupt which can be used for a PCI device. The background is that several kernels, like OKL4, do not support the use of Message-Signaled-Interrupts (MSI) or MSI-X. Older kernels, like Pistachio, do not even support the I/O Advanced Programmable Interrupt Controller (IOAPIC), and are even more limited regarding available interrupt pins. On kernels that support all kinds of interrupts, devices with support for MSI or MSI-X were reported to prefer MSI-X. However, in rare cases we observed problems with the WiFi driver on MSI-X capable hardware. Therefore, we switch the priority of reporting MSI over MSI-X if both are available. In addition, we experienced problems with some Intel HDAUDIO cards and MSIs. Therefore, we do not report the MSI capability on those devices for the time being.
Platform driver
The generic platform driver got re-worked to support the newly provided information from the PCI decoder. The given reserved memory regions of a device are used to add corresponding entries in the IOMMU.
The new "prefetchable" attribute for corresponding I/O memory regions - typically only "stolen memory" of the video graphics card - is used to decide when I/O memory can be mapped as write-combined into the address space of the client. Now that the platform driver decides for which I/O memory these special paging attributes are sensible to use, the actual driver no longer needs to distinguish special paging attributes for I/O memory. Therefore, we removed those details from the io_mem call.
PCI devices on x86 without MSI or MSI-X support may still share the same interrupt line. To make the generic platform driver functional on these platforms, we had to add shared interrupt support. When the platform driver receives its devices report, it iterates over all devices and their interrupt resources, and detects any shared interrupts. For those interrupts, the platform driver provides a custom IRQ service, thereby realizing the sharing. For all other interrupts, it hands out the IRQ capability as obtained from core directly.
The generic platform driver can now set up MSI-X within the PCI configuration space of a device, if the devices ROM instructs it to do so.
The ability to power and reset PCI devices was also missing in the generic platform driver so far. We caught up on implementing this feature.
Several PCI enablement quirks are needed for correctly running devices and drivers. Especially the hand-off of devices in between BIOS/UEFI and OS are an example for this. We encountered problems when doing this too late. Therefore, we moved the PCI quirks from the moment of first usage to the startup of the platform driver. Moreover, PCI quirks for EHCI and HDAUDIO were added.
VirtIO PCI devices hide several important information about their queues inside the PCI configuration space. Now that we do not provide direct access to the PCI configuration space to device drivers, the platform driver needs to identify VirtIO devices, and provide the necessary information via the devices ROM to the driver. It does so in the following way:
<device ...>
<pci-config ...>
...
<virtio_range type="notify" index="1" offset="0x200" size="0x100"/>
</pci-config>
</device>
Sometimes a device driver is needed to set up a device but doesn't necessarily need to stay present while the device is active. The PCIe host controller for the i.MX 8MQ SoC described in Section New PCI and network drivers for NXP i.MX is such an example. To be able to destruct a platform resp. single device session at the platform driver without automatically powering it off or resetting it, we introduced the "leave_operational" attribute. As the name suggests, it leaves a device untouched when its session gets closed. The attribute is part of the policy node for the client within the platform driver's configuration.
Platform driver for PC hardware
The vanished and deprecated x86-specific platform driver was able to reset a machine via I/O port access. It did so upon observing the state attribute of the system ROM having the value "reset". This feature is mainly used within Sculpt OS. To not lose this ability, a platform driver specific to PCs is now part of the repos/pc repository. It shares all code and semantics with the generic platform driver, but adds this single functionality.
Platform API clients
All remaining x86-centered device drivers got reworked to use the generic platform API and its helper utilities in platform_session/device.h and platform_session/dma_buffer.h.
The lx_kit and lx_emul layers within the repos/dde_linux repository now use one and the same generic layer too. While reworking these libraries, we addressed a performance penalty in the interrupt handling. The multiple opening and closing of interrupt sessions is now eliminated. Moreover, we removed the legacy_pc_usb_host_drv from repos/dde_linux.
All run-scripts and packages were revised to use the new drivers.
PinePhone drivers for audio, camera, and power control
Over the past 18 months, we have steadily expanded the base of device drivers for the PinePhone, initially addressing the display and touchscreen, later covering the modem, system control, GPU, and SD-card. With the current release, we wrap up this line of work with drivers for audio, camera, and power control.
As a prerequisite step for enabling the camera, we changed the version of the Linux kernel that we use as donor of the driver code. Up to now, we relied on the vanilla Linux kernel for the Allwinner SoC. However, the camera support still resides on Ondrej Jirman's custom kernel (orange-pi-5.14), which is apparently the kernel of choice for most Linux distributions for the PinePhone. We follow suit.
Audio
The added audio support consists of two separate components, namely an audio-control driver and audio in/out driver. The former controls the audio routing and mixing on the hardware level. It is responsible to route the mic to the modem during voice call, control the gain, or enable/disable the speaker. The privacy-sensitive audio-control driver is meant to be part of the base system of Sculpt. It operates according to its configuration, which can be updated dynamically.
Volumes can be configured by nodes within the <config> node using a volume attribute (range 0-100) where 0 implies turning off the input or output device. Supported nodes are <mic>, <speaker>, and <earpiece>. Furthermore, a <codec> node can be used to switch the audio path between the modem and the ARM application processor (SoC). Its target attribute can be set to either "soc" (default) or "modem". The "soc" mode implicitly sets the codec's sample rate to 44.1 KHz whereas "modem" mode sets the sample rate to 48 KHz. This distinction is required because the modem is compatible with 8 KHz only. The modem's 8 KHz can be cleanly converted to 48 KHz.
In contrast to the audio-control driver, the audio in/out driver is concerned with streaming PCM audio data to/from the ARM application processor. It allows audio applications hosted in the user-defined runtime of Sculpt OS to record and play audio via Genode's audio-in and audio-out session interfaces. The combination of both drivers can be exercised via the audio_pinephone.run script.
Power control
The new power-control driver is based on our custom firmware for the A64's system-control processor (SCP) in combination with Genode's dedicated scp-session interface that allows Genode components to interact with the SCP.
To properly arbitrate the access to the power-management IC (PMIC) between the SCP firmware and the ARM application processor, the PMIC driver has been moved entirely to the SCP side. This way, both the SCP firmware and Genode-based SCP clients become able to safely access the PMIC without stepping on each other's toes. In particular, the platform driver acts as an SCP client to toggle power controls. Since the platform driver now depends on the SCP, we co-located the formerly separate SCP driver component with the platform driver.
Built upon this infrastructure, a new power driver exercises control over several low-level aspects of the PinePhone hardware such as:
-
Platform reboot (via the PMIC),
-
Powering down the system (via the PMIC),
-
Switching between the power profiles "performance" and "economic", which clock the ARM CPU at 1296 MHz and 816 MHz respectively,
-
Reporting the remaining battery capacity, power draw, or charge current,
-
Triggering the charging when connecting a charger, and
-
Adjusting the backlight brightness.
Besides being integrated in Sculpt OS, the driver can be exercised in isolation using the power_pinephone.run script.
Camera
The added camera driver component consists of a port of the Linux SUN6I-CSI as well as OV5640 and GC2145 drivers. It renders the captured camera image data into a GUI session according to the following configuration attributes.
The camera attribute selects the camera. Supported values as "front" and "rear". The width and height attributes select the horizontal and vertical resolution. Valid configurations are 640x480 as well as 1280x720. The fps attribute selects the capture rate of the camera. Valid values are "15" and "30". The format attribute selects the capture format. The only valid value is "yuv", which selects YUV420. The convert attribute specifies if the captured image data is converted to the pixel format suitable for the GUI display. Default is "true". The rotate attribute specifies if the capture image data is rotated counter-clockwise and flipped. Default is true.
The integration of the driver is exemplified by the camera_pinephone.run script. The test scenario displays the camera image on the framebuffer. It repeatedly switches between front and rear camera.
New PCI and network drivers for NXP i.MX
PCIe host controller for i.MX 8MQ
The i.MX 8MQ SoC includes two PCI-express host controllers. The MNT Reform 2 laptop for example exposes both via one M.2 and one miniPCIe socket, e.g., to drive an NVMe card and a WiFi card. In contrast to x86-based PCs, those PCIe controllers are not set up by boot-firmware like BIOS or UEFI, but need to be driven by the OS first. Therefore, this release contains a new PCIe driver for the mentioned SoC. This driver does not provide a special API. It uses the platform driver to obtain the device resources of the PCIe controller, and enables and configures it appropriately. It then parses the PCI configuration space of the device behind the controller, which in fact acts as PCI host bridge. The collected device and PCI information is then exposed via the report service analogously to the PCI decode component available for x86. Finally, the platform driver resp. another incarnation of the platform driver can consume this report as devices ROM, and provide the device resources to a driver of the PCI device.
In practice, we have tested the PCIe host controller driver in combination with an NVMe card used in the MNT Reform 2 laptop only. Moreover, it got integrated in Sculpt OS for the MNT Reform 2. Therefore, we had to add an i.MX 8MQ specific driver manager. This management component is able to check for the availability of an NVMe device, controls the driver's lifetime, and assembles a block-device report that covers both SD-card and NVMe devices.
FEC Network driver
There is long-standing support for the Freescale Ethernet Controller (FEC) within Genode available, supporting a broad range of SoCs from i.MX 53 up to i.MX 8. But the existing driver port taken from Linux 4.16.3 was running shakily on the i.MX 8MQ SoC and the i.MX 6 Sabrelite board. Instead of trying to investigate potentially violated semantics in the legacy DDE Linux emulation code, we ported the Linux device driver for FEC from scratch. Thereby, we've used the recent DDE Linux porting approach, first described in the 21.08 release. The new driver is based on the vanilla Linux kernel 5.11 plus the MNT Reform 2 patches provided by Lukas Hartmann, which we already use for other drivers available in the genode-imx repository.
To enable the driver to work correctly, it needs information about its clock frequencies. Therefore, we have extended the platform driver for i.MX 53, and introduced new rudimentary platform drivers specific to i.MX 6 and 7, which expose the needed clock frequencies.
USB-C on i.MX 8MQ EVK
The USB host controller driver for the i.MX 8MQ EVK board did not enable the second USB host controller yet, which is connected to the USB-C socket of the board. Now this host controller gets driven too.
Intel graphics
The Intel display driver was enabled to run on Intel Alderlake graphics PCs, tested on the 12th Gen Framework Laptop. Furthermore, the driver now supports 4K displays, tested specifically on Dell Ultrasharp and LG 27MU67 hardware. Additionally, the driver may now be configured to set up an upper resolution bound to avoid out-of-service exceptions due to unexpectedly high memory needs. This feature is used by default on Sculpt to limit resolutions to WQHD aka 1440p aka 2560x1440 pixels and can be changed in repos/gems/sculpt/fb_drv/default.
Audio driver updated to OpenBSD 7.1
We updated the audio-driver component to OpenBSD version 7.1 that brings in support for playback on more recent 12th Gen Intel machines. Besides the update, we remedied a long-standing shortcoming when handling multiple HD-Audio devices and removed the support for old audio devices.
The component contained a simple check to exclude known non-working devices but depending on the machine's configuration, this check was incomplete. Rather than extending the check, we took a step back and changed the probing behavior of the component:
[init -> audio_drv] azalia0 [8086:160c] [init -> audio_drv] : [init -> audio_drv] azalia0: no supported codecs [init -> audio_drv] azalia1 [8086:9ca0] [init -> audio_drv] : [init -> audio_drv] azalia1: codecs: Realtek ALC292 [init -> audio_drv] audio0 at azalia1
It now checks all available devices and picks the first one it can use. This comes in handy in configurations where the virtual PCI-bus is populated with all audio devices found in a machine and some of them contain unsupported codecs as, among others, found on GPUs.
Furthermore, we decided to remove the eap and auich drivers as these drivers rely on I/O port access, which still had to be enabled in the component after the switch to the new platform driver and due to being of minor importance in daily use. The first one was mainly used to initially develop the component and later on for testing in QEMU. The second one on the other hand was merely enabled to provide a shot at getting audio in VirtualBox VMs where the component did not work with the HDA device model at the time.
Improved ACPICA driver
The ACPICA driver got improved support for Thinkpad notebooks to report ACPI events and in particular battery state changes. The frequency of checking of state changes, which are not triggered by an ACPI event, can now be configured explicitly, which is documented in the README file of the component.
Additionally, the ACPICA component got extended to support ACPI suspend & resume functionality. On the one hand the component can be configured to determine and report the supported ACPI sleep states (S1-S5) of a PC machine. On the other hand, the component can now react on system ROM changes and participate on sleep state preparation and the subsequent wakeup procedure using the ACPICA library, e.g., AcpiEnterSleepStatePrep, AcpiLeaveSleepStatePrep and AcpiLeaveSleepState.
Wireless-networking improvements
In the process of enabling the Intel AX211 WiFi card, DDE-Linux and the WiFi driver were enhanced to support loading PNVM firmware files. Ultimately, a workaround from QubesOS was needed to make the card work, highlighting shared challenges that both our projects face when using Linux drivers in unconventional ways to improve system security.
Platforms
Low-level mechanism for suspend/resume on PC platforms
On modern PC platforms, suspend and resume is realized by using a mechanism provided by ACPI. The Advanced Configuration and Power Interface defines (besides many other things) several global states (Gx) and six sleep states (Sx) an operating system (OS) can choose. Oversimplified, the S0 state is the normal working state, S1-S2 are light sleeping states, S3 is known as "suspend to RAM" state, S4 is called "suspend to disk" and S5 is mostly "off". See https://en.wikipedia.org/wiki/ACPI#OSPM_responsibilities for a basic overview and further pointers for reading.
The supported sleep states vary between PCs, some of which do not even support all states. An operating system has to look up and determine the supported Sx states, which are part of ACPI tables and ACPI AML code. Beginning with this Genode release, we can use the ACPICA driver to lookup the supported Sx states. The sleep states themselves are represented as two values (TYP_SLPa and TYP_SLPb in ACPI specification) and are reported by the ACPICA driver.
In order to trigger/program the intended sleep state, an OS like Genode + used kernel has to look up and set up several ACPI tables, e.g., FACS & FADT. Via the tables, the OS deposits a wakeup vector, which is called by the UEFI firmware on wakeup. Before actually going to sleep, the OS has to take care to flush all kinds of hardware cached state either to memory or persistence storage, depending on the Sx state.
With this release, we added principal support for S3 "suspend to RAM" in Genode using the NOVA kernel. The kernel now supports a privileged suspend syscall, which is solely available to Genode's core roottask. The invocation is triggered and guarded by Genode's Pd::managing_system RPC function, which takes both TYP_SLPa and TYP_SLPb values as parameters representing the intended Sx state. On invocation, Genode's core will check that the component holds Genode's managing-system capability. On success, the suspend syscall of the NOVA kernel is invoked and will lead to holding all CPUs, depositing the wakeup vector in the ACPI tables, flushing cached state of Genode's components to memory, like CPU registers, FPU state, IO-APIC state and virtualization state of Intel' VMX or AMD's SVM. Finally, both TYP_SLP values will be used to trigger the sleep state.
On ACPI wakeup, the UEFI/BIOS firmware wakes up the NOVA kernel via the deposited wakeup vector. The kernel re-initializes the CPU and wakes up all other CPUs. Finally, control will be transferred to Genode's roottask (core), which can thereby return from the Pd::managing_system RPC call.
Before and after the actual suspend and resume, the ACPICA driver should be used to run ACPI AML methods to prepare and post-process the system state change, which may affect the success of the Sx state transfer depending on the used PC platform. Additionally, after resume, all hardware and their drivers must be considered to be re-initialized. The re-initialization and re-starting of drivers and hardware, e.g., PCI, is not finished currently.
An early prototype for exercising this scenario is available in the form of the acpi_suspend.run script in the libports repository. This test scenario periodically suspends and resumes the hardware and also restarts the used display driver. The low level ACPI suspend and resume can be observed to work quite reliable, which we could validate across several generations of Intel notebooks and some AMD desktop machines. However, the re-starting of the display driver is not always reliable. Restarting the Intel display driver worked notably well on older Thinkpad notebooks, e.g., X201 and T420.
Note that the suspend/resume feature is still work in progress. The next potential work items are the addition of suspend/resume support to the base-hw kernel, ways to power-off and power-on (PCI) hardware, e.g.,via the new platform driver, and re-initializing and/or re-starting drivers. Additionally, a convenient way to debug resume issues is desired when no serial output is working anymore after resume.
Base-HW microkernel
The base-hw kernel, which was specifically developed for Genode, did not provide the use of Message-Signaled-Interrupts (MSI), and MSI-X yet. With this release, x86 architectural support for MSI and MSI-X entered the base-hw kernel. The usage of MSI or legacy interrupts is transparent to the user. It gets determined in the interplay of the PCI decode component, platform driver, and core.
NOVA microhypervisor
Besides the added ACPI suspend/resume support described in Section Low-level mechanism for suspend/resume on PC platforms, the kernel received principal support to run on more than 32 CPUs. By default, Genode's and the kernel's CPU limit is set to 64, configurable by the constants MAX_SUPPORTED_CPUS in Genode's core respectively NUM_CPU in the kernel. In our tests, up to 250 CPUs were usable in Qemu.
Build system and tools
Streamlined building of libraries
The release adds special handling for lib/<libname> arguments to the build system, which supersedes the former LIB=<libname> mechanism. Whereas the old mechanism was limited to a single library, the new convention allows multiple library arguments, similar to regular targets.
The change brings two immediate benefits. First, the streamlining of library and target arguments allows for the building of libraries via the build command of the run tool. Second, it alleviates the need for pseudo target.mk files for building shared libraries that have no direct dependencies, in particular VFS plugins.
Note that target.mk files located under src/lib/ are no longer reachable. Therefore, all run scripts that used to trigger the build of a shared library via a pseudo target must be adapted. E.g., build lib/vfs/tap must be replaced by build lib/vfs_tap.
The former LIB=<libname> option is no longer supported.
Boot-loading over HTTP
The standard network-boot approach for x86 at Genode Labs has been a combination of the PC-integrated Preboot Execution Environment (PXE), the Pulsar boot loader, and the TFTP protocol for years. Because Pulsar is tied to legacy BIOS interfaces, UEFI-only hardware demands for alternatives. iPXE is a field-tested, UEFI-compatible alternative that is already supported in Genode's run tool via load/ipxe.
One of the prominent features of iPXE is the support for additional network (boot) protocols beyond TFTP with HTTP as a tempting option to improve boot performance. This release enhances the load/ipxe run module to optionally configure and spawn the lightweight HTTP server lighttpd to serve the boot image to iPXE using the following declarations in etc/build.conf.
RUN_OPT += --include load/ipxe RUN_OPT += --load-ipxe-base-dir /tftpboot RUN_OPT += --load-ipxe-boot-dir /ipxe RUN_OPT += --load-ipxe-lighttpd RUN_OPT += --load-ipxe-lighttpd-port 2209
The HTTP server is run only while the run tool is executed, killed on exit, and limited to serve the contents of the test-specific directory under var/run/ in your build directory. Your iPXE boot loader should be configured to chain the automatically generated boot.cfg file as follows.
#!ipxe chain http://<host ip address>:2209/boot.cfg
For more details, please refer to the dedicated Genodians.org article.
- Getting Fujitsu U7411 up and running - Network Boot
-
https://genodians.org/chelmuth/2022-11-24-u7411-up-and-running
Configurable Intel HWP mode
We updated our version of the Bender chain-boot loader to be configurable regarding the mode in which to run Intel's Hardware P-States (HWP). When running Genode on NOVA, the HWP mode can now be controlled via the new run option --bender-intel-hwp-mode. The option responds to the values off, performance, balanced, and power_saving. The default value is performance in order to stay backwards compatible. On kernels other than NOVA, HWP remains turned off in general.