
Release notes for the Genode OS Framework 20.08
There are two overarching themes of Genode version 20.08: Increasing the weight of native work loads, and strengthening the system's resilience against driver failures.
With native work loads, we are speaking of software executed directly on Genode without relying on virtual machines. Compared to static systems or hypervisor scenarios, such work loads are brutally unforgiving when it comes to the quality of the POSIX runtime, the performance of Genode's protocol stacks, and the economics of the porting of software. By bringing the Chromium web engine alive, we expose Genode to one of the most heavy-weight commodity software stacks in existence. We are thrilled to report in Section Improved Qt5 integration and work flows that the Chromium-based Falkon web browser can be hosted on Sculpt OS now. The collateral effects of this work are at least as valuable as the particular application: Improved work flows for porting large software projects, and covering many formerly hidden corner cases of the C and C++ runtimes.
With Sculpt OS, the resilience of Genode in the event of failing graphics or input drivers came into focus. Section The GUI stack, restacked describes a complex surgery that puts the low-level GUI stack upside down, paving the ground for exciting features like swapping out or updating drivers on the fly without reboot.
Besides these main topics, the current release features the continuation of of two long-term projects, namely the CBE block encrypter and the profound support of 64-bit ARM devices. Section Consistent Block Encrypter describes the CBE's new pluggable crypto and trust anchor facilities. Section Device drivers goes into detail about the steadily emerging driver landscape on 64-bit ARM.
The GUI stack, restacked
The current release breaks free from several limitations of Genode's low-level GUI stack. This architectural change was preceded by a two-years planning and exploration phase, spinning the following goals in our heads:
-
Achieving resilience against failing device drivers. Graphical applications on Genode shall be able to survive driver failures. We strive to keep overly complex device drivers out of the trusted computing base of security-critical applications.
-
Enabling the principal support for screen capturing and remote desktop scenarios without compromising the security and privacy of the user.
-
Paving the ground for sophisticated multi-head scenarios in the future, e.g., using more than one graphics card.
-
Starting, killing, and updating drivers at runtime without rebooting the system.
-
Optimizing the throughput of the pixel data path and the input latency, aiming at a highly responsive interactive experience without tearing artifacts.
The key idea and plan for this change has been laid out in the dedicated article Restacking the GUI stack. We executed the steps outlined in the article just in time for the current release.
Consistent naming
The starting point of Genode's GUI stack was the nitpicker GUI server, introduced in 2006 and based on prior research of the Genode developers (PDF). Back then, the name of the implementation somehow proliferated throughout Genode from the API level, over the configuration level, up to the naming of related components. Over the years, the jargon crept into the project without much thought. This had to stop and now was the right time. The renaming affects the following areas.
- Source tree
-
The include/nitpicker_session headers moved to include/gui_session. Those headers are not tied to the specific nitpicker implementation but are much more general. For example, the window manager provides an alternative implementation of the same interface.
The change also affects the corresponding depot API archive accordingly.
- Configuration and run scripts
-
The "Nitpicker" service is now called "Gui" service. The upper/lower casing follows the convention for services provided outside of Genode's core component.
- Packaged runtime definitions
-
The <nitpicker> nodes in runtime files are now named <gui>.
- API level
-
The C++ namespace Nitpicker has been renamed to Gui.
- Component names
-
The nit_fb server has become the gui_fb server. The nit_fader has become the gui_fader.
Streamlined pixel format
Genode's framebuffer session interface was traditionally based on the RGB565 pixel format. We have now changed the format to 32-bit XRGB where the X part is ignored. We updated all affected libraries, graphical applications, and device drivers accordingly.
This change also affects the users of the drivers_interactive packages. Now, we generally assign 64 MiB RAM and 1500 caps to the drivers subsystem, which is sufficient for covering high resolutions at 32 bits per pixel and to accommodate multi-component USB HID input stacks.
New "Capture" and "Event" session interfaces
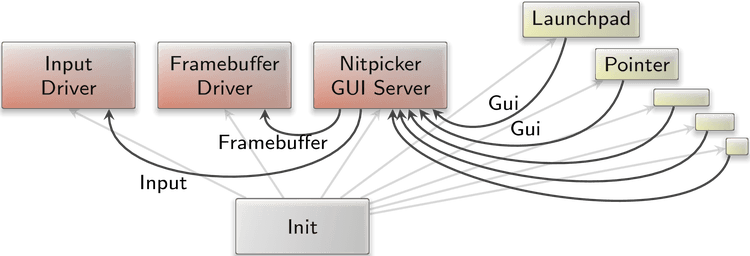
Traditionally, Genode's driver model for framebuffer and input drivers followed a layered architecture. Each framebuffer driver naturally provided a "Framebuffer" service and each user-input driver provided an "Input" service. At the next layer, the nitpicker GUI server would use those services as a client and, in turn, provide a higher-level "Nitpicker" service (which has now been renamed to "Gui"). In this architecture, higher levels naturally depend on all lower levels, specifically the framebuffer and input drivers at the bottom. The interplay of the components looks as follows. The arrows denote client-server relationships where the arrow points from the client to the server. The drivers and the nitpicker GUI server are displayed in red because they are servers. The GUI applications at the right are nitpicker clients. Nitpicker, in turn, is a client of the framebuffer and input drivers.
|
This architecture is flawed because it makes the trusted low-complexity GUI server (nitpicker) depend on high-complexity and potentially flaky device drivers. If a driver fails, the entire GUI stack - up to the applications - suffers. To put the risk into perspective: The binary of the nitpicker GUI server incorporates about 11,000 lines of code, which includes the Genode API. The actual nitpicker code is about 3000 lines of plain C++. In contrast, the Intel framebuffer driver comprises more than 122,000 lines of code (sloccount). Code complexity equals risk. The dependency of nitpicker on the Intel framebuffer driver is indefensible. For input devices like USB HID, the situation looks very similar.
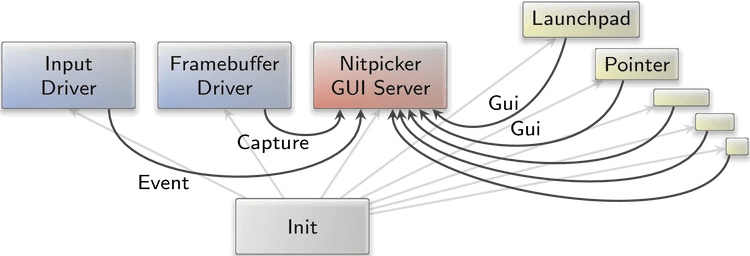
To solve this dilemma, we had to turn the client-server relationship between the GUI server and the drivers upside down. This approach is enabled by two new service interfaces. The new "Event" session replaces the former input session. The new "Capture" session replaces the former framebuffer session. The information that is flowing through those interfaces remains the same - input events and pixels - but the direction is reversed. An event client propagates input events to the server. A capture client obtains pixel data from the server.
|
In the new architecture, nitpicker remains as the only server, providing the "Event", "Capture", and "Gui" interfaces. It does no longer depend on the well-being of any driver. This is reflected by the <start> node of nitpicker when integrating the GUI server into an init configuration:
<provides> <service name="Gui"/> <service name="Capture"/> <service name="Event"/> /provides>
To retain support of cascaded usage scenarios of the GUI server, nitpicker can still be instructed to request a framebuffer session or input session by specifying the <config> attributes request_framebuffer="yes" and request_input="yes". If specified, nitpicker requests sessions for an "Input" and a "Framebuffer" service upon startup and uses those as input/output back end. Those services are usually provided by the gui_fb component. Note that this facility may eventually be replaced by a request_gui attribute (requesting a GUI session), eliminating the notion of framebuffer and input services altogether.
Turning all framebuffer and input drivers into nitpicker clients
Following the introduction of the new capture-session interface, we replaced the use of the "Framebuffer" session interface by the new "Capture" session interface in all framebuffer drivers. The new versions of all drivers had to be tested on the respective hardware. Generally, the drivers have become simpler.
Analogously to the graphics drivers, all input drivers had to be reworked to operate as event clients instead of input servers. This came down to adjusting and testing the variety of PS/2 drivers and USB HID drivers on all supported platforms. As a minor side note, the server/acpi_input pseudo driver has turned into the app/acpi_event application. Similar to the framebuffer drivers, the transition from input servers to event clients generally made the drivers simpler.
The drivers_interactive packages for various boards have changed their public interface. The drivers subsystem no longer provides "Framebuffer" and "Input" services but needs a valid route to the "Capture" and "Event" services provided by nitpicker. It goes without saying that this change affected all run scripts that make use of nitpicker.
Replacing the input filter with an event filter
The transition from the "Input" session to the "Event" session is not limited to the drivers only but also affected Genode's input-filtering mechanism. The functionality of the input_filter is now provided by the event_filter. The event filter requests only one "Event" session as destination for the filter results, which is usually routed to the nitpicker GUI server. It provides an "Event" service to which any number of event sources can connect.
The configuration of the filter chain remains almost the same. Only the declaration of the <input> nodes is no longer needed. Instead, the configuration must specify <policy> nodes, which define the mapping of "Event" clients (event sources) to the inputs used in the filter chain.
Improved Qt5 integration and work flows
Streamlined build-system integration
Up to now, Qt libraries and applications for Genode had been built using the Genode build system. The Qt library build files in the libports/lib/mk directory were in part generated with a shell script from the GNU make files which the qmake tool had generated when building Qt for Linux. Also there was some rudimentary support for building Qt applications from qmake project files by just interpreting the qmake project files as GNU make files and translating the relevant qmake variables to corresponding Genode build-system variables.
But this approach was not feasible anymore when building the qtwebengine module (the successor of the deprecated qtwebkit module), which is based on the Chromium web engine source code and mostly built with the Ninja build system on officially supported platforms instead of qmake.
We also wanted to make it easier for Genode users to build Qt applications, in particular by using the goa tool. It would be better to be able to actually process qmake project files with the qmake tool instead of interpreting them as GNU make files and aborting when a project file contains qmake-specific code not understood by GNU make.
For these reasons, we reworked the Qt build process such that it now uses qmake with a tailored Genode platform configuration for building both Qt libraries and applications.
If you have already built a Qt application for Genode and want to continue using it with the new release and you cannot use the goa tool yet (for example because additional Qt libraries cannot be built with goa or because other architectures than x86_64 are not supported by goa currently), you need to update the target.mk file (and any run scripts) of your project. For the details, please have a look at the updated Qt example projects in the libports repository and feel free to ask on the Genode mailing list if any problems arise with the conversion. It is also necessary to rebuild the Qt tool chain with the tool/tool_chain_qt5 script to get the qmake tool built and installed.
While converting the run scripts of the Qt example projects, we switched to usage of the drivers_interactive package, which is the preferred way to start drivers for interactive scenarios nowadays. A downside might be that network or storage drivers are not loaded this way. If these features are needed for a Qt project, the suggested solution is to use goa or to run the scenario with Sculpt OS instead, if possible.
Another Qt-related feature in this release is that the qt5_component library now extracts command line arguments and environment variables from the config ROM, like the posix library already did for non-Qt applications.
Chromium engine and Falkon web browser
Since the previously ported Arora web browser has not been maintained upstream for years and the qtwebkit Qt module it depended on has also been deprecated in the meantime, it was eventually time to try to port the newer Chromium-based qtwebengine module to Genode as well as to find a new and maintained qtwebengine-based web browser which could replace Arora. At first glance, porting qtwebengine to Genode appeared to be quite a challenging task, since officially only Linux, Windows, and macOS are supported and most of the qtwebengine code, which also contains a huge amount of third-party libraries, is not built with qmake for the most part like other Qt modules, but with the Ninja build system.
Fortunately, the situation turned out to be less problematic than expected, at least with regard to the initial goal of getting a lightweight web browser running and displaying regular web sites comparably to Arora. One reason for that is that there already existed a qtwebengine port for FreeBSD, which resolved most of the possible libc compatibility problems and thus served as the basis for the Genode port. There were still some operating system specifics in the code, which had to be dealt with, though, like supporting shared memory with mmap or cache maintenance for JIT-compiled JavaScript code. Advanced web-engine features like multimedia support are disabled at the moment, also some security-related features like the verification of server certificates (requires a port of libnss), multi-processing, or sandboxing remain unused at the current time.
The build system issue could eventually be resolved by adding a Genode platform back end for qmake and passing the correct compiler options to the Chromium build system.
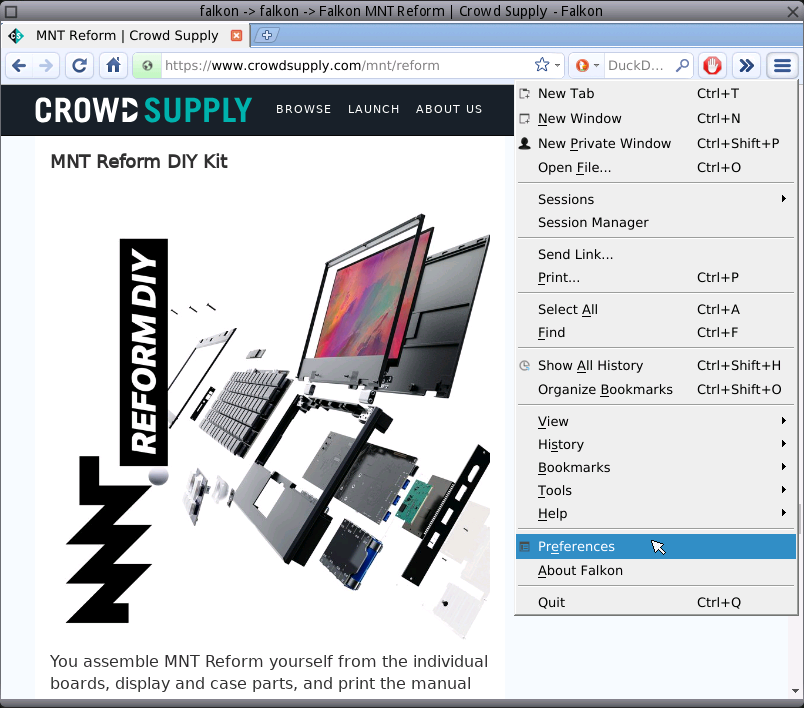
As qtwebengine-based web browser, we chose the Falkon browser, which was previously known as QupZilla. Even though the current performance and memory footprint clearly call for further optimization work on our side, it looks quite promising so far:
|
For the upcoming release of the a Sculpt OS in September, Falkon will be offered as a ready-to-use package.
The Arora web browser and qtwebkit module are no longer available with this release.
Base framework and OS-level infrastructure
Base API/ABI changes
Synchronization primitives
With the current release, we wrap up the migration of the code base from the Lock to the Mutex and Blockade types to improve diagnostics and clear the path towards future performance optimizations.
Moved atexit handling from base library to C runtime
Traditionally, Genode's base library took care of the execution of atexit handlers as this mechanism was regarded as fundamental to both C and C++. In particular, the C++ compiler automatically generates calls to the __cxa_atexit function of the C++ ABI for objects instantiated as local static variables so that the destructors of such objects are called at the exit of the program.
With the transition to Genode's modern component API (introduced in version 16.05), this mechanism became irrelevant for plain Genode components. But for higher-level components that rely on the C runtime, in particular POSIX applications, this mechanism remained crucial. Hence, we did not question the presence of the atexit mechanism in Genode's base library for a long time.
However, we ultimately realized that the atexit functionality must be moved from the base library into the C runtime to fully adhere the execution model of the C runtime. Atexit handlers may perform I/O such as the closing and syncing of files after all.
This change has the positive side effect of reducing the complexity of the base library. Furthermore, it overcomes the limitations of the formerly statically dimensioned array of atexit handlers, which was wasteful for plain Genode components, yet insufficient for complex POSIX applications.
Note that this change deliberately renders the atexit mechanism for plain Genode components (without C runtime) ineffective. Genode components that used to rely on the genode_exit function for calling cleanup code must be changed to explicitly call cleanup code.
This change also removes the implicit call of genode_exit(1) by abort, which is triggered by, i.e., uncaught exceptions. Scenarios that relied on the former behavior for component monitoring should be changed to use Genode's heartbeat monitoring mechanism instead.
As another minor but still noteworthy detail, shared-library destructors are no longer called via the atexit mechanism but explicitly by the dynamic linker. This slightly changes the call order of destructors: Functions marked as destructors are called after the libc-managed atexit handlers now.
Removal of deprecated interfaces
Unsafe Xml_node methods
The unsafe Xml_node methods that were marked as deprecated in the previous release are removed now.
Cancel-blocking interface
Closely related to the revised synchronization primitives mentioned above, we removed the outdated Cancelable_lock API along with the underlying cancel-blocking mechanism, which had become obsolete by now. In past times, this mechanism was employed to cleanly wind down threads that are blocked at their destruction time. The move of Genode's API design away from blocking RPC to asynchronously working components marginalized the problem to the point where it ceased to exist.
Delayed dispatch of Rpc_entrypoint
Similar to the cancel-blocking mechanism, the ability to delay the dispatching of RPC requests until an explicit call of Rpc_entrypoint::activate is an API relic from a time when each RPC server was multi-threaded. The modern flow of execution has become much simpler, eliminating the need for this feature.
C runtime
Serialized VFS access
Unsurprisingly, the VFS is an integral part of the C runtime as everything is a file in the UNIX philosophy. The basis for the libc VFS is the VFS library and its versatile plugin concept. As the libc (and other users of the library) may employ multiple threads, which could use the VFS, the integrity of data structures, esp. those of more complex plugins like the network stack in vfs_lwip, must be protected from concurrent access. From the beginning, we planned to move the serialization of accesses out of the plugins into code that uses the VFS library but missed to completely achieve this goal with the libc execution model. With Genode 20.08, we transform the lower parts of the libc into an execution monitor that ensures the aspired serialized processing of VFS operations. This paves the way towards the removal of synchronization measures in all VFS plugins with the upcoming release.
Removal of libc_pipe LibC plugin
The VFS pipe plugin was introduced in Genode 19.11 and matured into a suitable replacement for the aged libc_pipe plugin library. Now, we finalize this process by removing the old libc plugin from Genode and adapt all run scripts (most prominently those for Qt5 examples). Users can migrate to the VFS plugin with the following changes to their component configurations.
-
The libc must be configured to access the pipe mechanism from a VFS path by the pipe="..." configuration attribute like follows.
<libc ... pipe="/pipe"/>
-
The pipe plugin must be instantiated in the VFS at the desired path.
<vfs>... <dir name="pipe"> <pipe/> </dir> </vfs>
-
Run scripts no longer need to integrate libc_pipe.lib.so into the boot modules but vfs_pipe.lib.so.
Placing pthreads on CPUs
Up to now, pthreads experienced no affinity configuration on creation time and ran implicitly on the first CPU available to the component only. With this release, we add a placement strategy and configuration option to the C runtime to enable the tuning of CPU placement for pthreads of libc components. The default placement strategy is all-cpus, which means pthreads are assigned to the available CPUs. round-robin.
The new <pthread placement="manual"> libc configuration sub-node can be used to manually place pthreads according to their id on cpu as follows.
<config>
<libc ...>
<pthread placement="manual">
. <thread id="0" cpu="0"/> <!-- pthread.0 placed on CPU 0 -->
. <thread id="1" cpu="1"/> <!-- pthread.1 placed on CPU 1 -->
. <thread id="2" cpu="2"/> <!-- pthread.2 placed on CPU 2 -->
. <thread id="3" cpu="2"/> <!-- pthread.3 placed on CPU 2 -->
</pthread>
</libc>
Note, the current placement-strategy implementation is limited to 32 pthreads. If more pthreads are running simultaneously further threads are placed on CPU 0.
Standard C++ library
We enabled support for thread-related features like std::thread or std::mutex in the stdcxx library.
Ada/SPARK support
With the development of the Consistent Block Encrypter, Genode's Ada/SPARK support was used in the context of a rather complex software project for the first time. Therefore, we felt the necessity to make up our minds about a generally accepted Ada/SPARK coding-style as long as this step still doesn't entail the painstaking adaption of large amounts of code.
Fortunately, the GNAT compiler flags assist developers a lot in this affair. That said, we added the consideration of two new environment Make-variables to the Genode tool chain: CC_ADA_WARN and CC_ADA_WARN_STRICT. Analogously to the C++ pendants (CC_CXX_WARN and CC_CXX_WARN_STRICT), the variable CC_ADA_WARN denotes the common warning-configuration of the compiler for Ada/SPARK whereas CC_ADA_WARN_STRICT applies additional configuration for a much higher level of strictness by default. This strict mode might be deactivated locally for code which is not subject to the Genode coding style - e.g., ported third party code - by adding the following line to the corresponding build description files.
CC_ADA_WARN_STRICT =
The common, less strict warning mode for Ada/SPARK merely enables all warning messages with the -wa flag. The strict mode, in addition to it, causes GNAT to treat warnings like errors and to refuse compiling affected code. In addition to that, the strict mode activates a broad variety of checks for potential pitfalls and style consistency using the configuration -gnatyyBdSux, which is compatible to the GNAT standard style. A comprehensive description of all the checks would be beyond the scope of this document. Please have a look at the GNAT style-checking reference instead if you're interested.
Besides the style enforcement through compiler flags, we decided to generally promote "Camel-Snake Casing" for Ada/SPARK code. The only exceptions from that are abbreviations of initials that are completely upper case and language keywords that are completely lower case. This would be a conform snippet of code:
function T1_Node_XML_Tag_Open (
Node : Type_1_Node_Type;
Node_Idx : Type_1_Node_Block_Index_Type;
Show_Hsh : Boolean;
VBA : Virtual_Block_Address_Type)
return String;
Another minor improvement of Genode's Ada/SPARK runtime consists in the added support for the exponential operator on integers.
Operating-system components
Consistent Block Encrypter
With the Genode 20.05 release, our Consistent Block Encrypter (CBE) reached feature completeness by adding support for online rekeying and online resizing. Furthermore, we were able to run a Linux virtual machine using a CBE device as system partition. During the last three months, we mainly reviewed and consolidated the code but also improved the integration in a notable way.
One important step forward is that we implemented a new reference trust anchor. The trust anchor (TA) is a separate entity (might be a smartcard, a USB dongle, or a piece of software) that the CBE relies on for key management and for storing superblock hashes. In contrast to the dummy TA we used for testing so far, the reference TA stores private key and superblock hashes persistently through a file-system back-end and requires the user to enter a passphrase to be unlocked. This enables the CBE to actually verify that the CBE device is in the same state that it was left in the last time and that only authorized users can access its data.
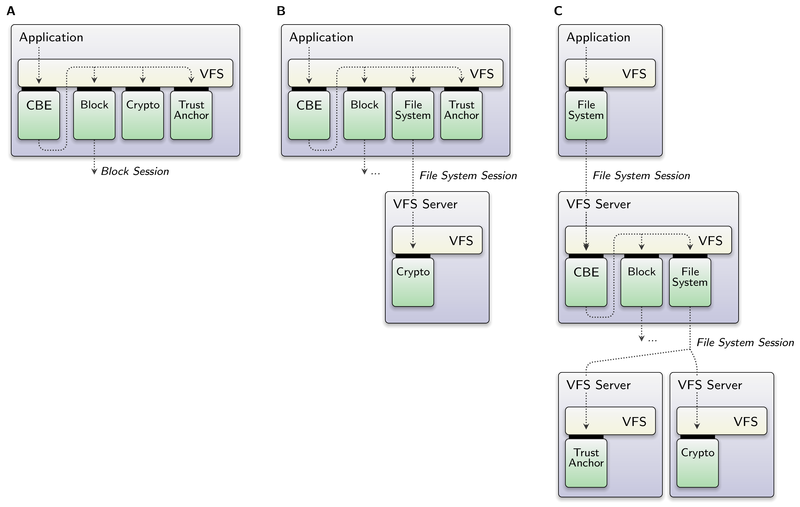
Furthermore, both the crypto and the TA back end of the CBE are now integrated through VFS plugins. This change gives the user of the CBE more flexibility in two ways. On one hand, one can switch between integrating those entities locally (inside the CBE driver) or remotely (in a VFS server instance isolated from the CBE driver) by merely altering the system configuration.
|
|
Three different ways to integrate the CBE
|
On the other hand, the implementation of the crypto entity and the trust anchor can now be swapped out through the means of configuration alone. For instance, let us take a look at the VFS server in the CBE test scenario repos/cbe/run/vfs_cbe.run:
<start name="vfs_cbe" caps="120">
<config>
<vfs>
<cbe_crypto_aes_cbc name="cbe_crypto"/>
...
</vfs>
...
</config>
...
</start>
We may replace the plugin employing an AES-CBC ESSIV block-cipher in this test with one using plain memcopy (in other words: disabling block encryption) by changing one line only:
<start name="vfs_cbe" caps="120">
<config>
<vfs>
<cbe_crypto_memcopy name="cbe_crypto"/>
...
</vfs>
...
</config>
...
</start>
The memcopy example may in fact be useful for contexts where only the abilities of the CBE to manage snapshots and to ensure consistency are of interest and encryption would only generate unnecessary overhead. However, the primary motivation for this high modularity is the easy integration of other cipher algorithms in the future.
In order to make things even more approachable, the VFS-plugin-related code between CBE, crypto entity, and trust anchor relies on generic interfaces. This simplifies supporting other existing cryptographic algorithms and TA types as enabling them boils down to the implementation of a handful of well defined hook functions.
As for the CBE demo scenario that we published with the previous Genode release: The corresponding packages moved from the package source cnuke to mstein. Furthermore, the CBE demo is now based on the unaltered Genode master branch and the new master branch in the CBE repository itself. Besides that, for the most part, the procedure for reproducing the demo described in the demo article and the demo video remained the same. But be prepared to find minor discrepancies.
Virtual file system (VFS)
We extended the zero VFS plugin to limit the amount of data - the number of zero bytes - it will provide on plain sequential reads. The file size can be determined by setting the size configuration attribute limiting readable seek offsets to the configured size and resulting in EOF beyond that offset. The attribute is parsed as Number_of_bytes, which caps the amount to the maximum of the addressable memory on the platform.
This addition comes in handy when needing to provide a synthetic empty file with a fixed size:
<vfs>
<ram/>
<import>
<zero name="block_file" size="32M"/>
</import>
</vfs>
Furthermore, we added an option to the terminal VFS plugin to ignore control characters. Usually this plugin is used in interactive configurations where reacting to control characters, e.g. ^C, is vital. That being said, the plugin lends itself as general transport mechanism for low-traffic data transfers. Those transfers, however, may contain arbitrary data that could very well be interpreted as control characters. Therefore, we introduced the raw configuration attribute. Setting the attribute instructs the plugin to pass all data through as-is without further interpretation.
<vfs>
<dir name="/dev">
<terminal name="io" raw="yes"/>
</dir>
</vfs>
Block server backed by VFS content
This release adds a new component that provides access to a VFS file via the block-session interface. Block requests will be translated to VFS requests operating directly on the file.
The client access is configured by setting the attributes of the policy node appropriately. The assumed block size of the underlying file must be specified via the block_size attribute. It defaults to 512 bytes.
The block count is determined by querying the file and dividing its size by the block size. Pseudo file systems, which do not return a proper size in their stat implementation will therefore not work. The writeable attribute denotes if the block session is allowed to perform write requests. However, should the underlying file be read-only, such requests will nonetheless fail. The default value is no.
The following snippet shows a configuration where the vfs_block component grants the component the_client writeable access to the ext2_disk.img file. In return, this file is accessed via a file-system session.
<start name="vfs_block">
<resource name="RAM" quantum="3M"/>
<provides> <service name="Block"/> </provides>
<config>
<vfs>
<fs buffer_size="2M" label="backend"/>
</vfs>
<policy label="the_client" file="/ext2_disk.img" block_size="512"
writeable="yes"/>
</config>
<route>
<service name="File_system" label="backend">
<child name="fs_provider"/> </service>
<any-service> <parent/> </any-service>
</route>
</start>
Since the vfs_block is - by using the VFS library - flexible enough to cover the use-cases of components like ram_block and rom_block, we were able to remove those components.
For example a typical rom_block use-case is implemented by using the following configuration:
<start name="vfs_block">
<resource name="RAM" quantum="2M"/>
<provides> <service name="Block"/> </provides>
<config>
<vfs>
<rom name="genode.iso"/>
</vfs>
<default-policy file="/genode.iso" block_size="2048"/>
</config>
<route>
<any-service> <parent/> </any-service>
</route>
</start>
On a technical note, the server currently allows a single session only and processes requests sequentially.
Device drivers
System management privilege
The PD session interface of the base library got extended by a system-management call:
Managing_system_state managing_system(Managing_system_state const & state)
It is used to call privileged system-management functionality, like power management or clock settings that cannot be implemented in user-land components. The transferred state is equivalent to the common general-purpose CPU registers. Currently, the function is implemented by base-hw's core component on ARMv8 to call the ARM Trusted Firmware on behalf of the PD session client. All other kernel and architectures leave the managing_system call empty.
A special privilege is necessary to enable a component to use the new call. Therefore, the init component's configuration provides a new attribute in the start node:
<start name="platform_drv" managing_system="yes"> ...
The new call and privilege got introduced in order to enable a platform driver to implement power management on modern ARM SoC.
The formerly existent, special privilege constrain_phys, which was used by the platform driver to constrain physical memory to be allocated for DMA to a specific region, is now implicit part of the managing_system privilege. Configurations must be adapted accordingly as the constrain_phys attribute is no longer supported.
That means configurations that so far used the "constrain_phys" attribute in the RAM resource description, like the following:
<start name="platform_drv"> <resource name="RAM" quantum="2M" constrain_phys="yes"/> ... </start>
have to be changed to the following to be effective:
<start name="platform_drv" managing_system="true"> <resource name="RAM"/> ... </start>
Platform driver
Configuration changes
The new platform driver API that was introduced with the previous release for the ARM architecture received a minor subsequent improvement, namely the device resource description within the configuration of the platform driver:
<device name"foo"> <resource name="IRQ" ... /> <resource name="IO_MEM" ... /> </device>
is now shortened to the following:
<device name="foo"> <irq ... /> <io_mem ... /> </device>
Power and clocks for i.MX 8M Quad SoC
To drive peripherals of the i.MX 8M Quad Evaluation Kit and the MNT Reform 2 appropriately, we introduce a new platform driver specific for the i.MX 8M Quad SoC used by both platforms.
The new driver supplements the API of the generic ARM platform driver introduced in release 20.05 with power and clock management specifically for this SoC. It comprises all power and clock settings available in the SoC. Single power domains and clocks can be assigned to devices. Whenever the client of the platform driver acquires a device, its power domains and clocks are enabled implicitly, and all clocks are set accordingly. When the device gets released, all power-domains and clocks are disabled again.
The following USB host-controller example for the i.MX 8M Quad EVK illustrates the additional configuration options:
<device name="usb_host_2">
<io_mem address="0x38200000" size="0x10000"/>
<irq number="73"/>
<power-domain name="usb_otg_2"/>
<clock name="usb_phy_ref_clk_root"
driver_name="usb_phy_root_clk"
parent="system_pll1_div8"
rate="100000000"/>
<clock name="usb_core_ref_clk_root"
parent="system_pll1_div8"
rate="100000000"/>
<clock name="usb_bus_clk_root"
parent="system_pll2_div2"
rate="500000000"/>
<clock name="usb_ctrl2_gate"/>
<clock name="usb_phy2_gate"/>
<property name="compatible" value="snps,dwc3"/>
<property name="dr_mode" value="host"/>
</device>
Most clock settings can be derived directly by looking at device tree sources for the corresponding board and peripheral, e.g., in the Linux kernel tree. But be aware that the clock names are aligned to the i.MX 8M Quad Applications Processors Reference Manual and not the Linux code.
As a side effect of the clock settings work, the CPU cores of the i.MX 8M Quad SoC are now running with the full-rate of 1.5 GHz.
New platform driver for Raspberry Pi
As some driver components like the USB host-controller driver share one code base across a lot of different boards, SoCs, and architectures. We like to unify the API they are dependent on, including the platform driver's API. Therefore, the already existent platform driver for Raspberry Pi 1 got modernized to take advantage of the new platform driver API for ARM introduced with the previous release.
However, we did not achieve to change all drivers at once. Therefore, we kept the old platform driver still used by some drivers for now. To prevent name clashes, the new driver is named "rpi_new_platform_drv" until the legacy driver "rpi_platform_drv" vanishes.
During this work, we unified the formerly different enumeration of interrupts between the Fiasco.OC and base-hw kernels.
USB host-controller driver
The USB host-controller driver got modified to iterate over all device resources the platform driver provides to it, and registers those in corresponding Linux kernel structures of the ported driver code. This board-specific information was hard-coded beforehand. Now, the driver uses the platform driver for x86, as well as all ARM architectures.
Interactive drivers support for Arndale and Panda boards
In the Genode world repository the almost abandoned support for Pandaboard and the Arndale board got revived by drivers_interactive depot packages for both platforms. Therewith, it is now easy again to use interactive run-script scenarios on these platforms.
Libraries and applications
Migration of ported software to Genode-World
In the previous releases, we continuously relieved the Genode main repository from features that receive no continuous maintenance. Rather than dropping such features, they find a new home at the Genode-World repository. We foster this distinction to avoid wrong expectations. Whereas the code of the Genode main repository is subjected to rigid quality assurance at Genode Labs, the content of the World repository is tested and maintained in a rather ad-hoc fashion.
The current release moves the Solo5 runtime (originally added in version 18.11) and the stubby DNS tool to the Genode-World repository.
New ported 3rd-party software in Genode-World
Port of SDL 2.0.14
As more and more software requires SDL2, it became necessary to support it as well in addition to the already existing support for SDL1. We therefore ported the up-to-date SDL version to Genode.
For the time being, its functionality is limited when compared to the SDL1 port. At the current time, only input and non-accelerated video are supported.
Even in its limited state, it suffices for Streaming Android to Genode using Scrcpy.
Port of gRPC
This work is a contribution by Pirmin Duss of Gapfruit. Thanks for this welcome update.
At gapfruit, we wanted to provide an efficient way to combine a Genode system with existing cloud environments. For that, we ported the gRPC/protobuf libraries and tool chain to Genode. For this release, we simplified the tool chain so it does not depend on any packages of your Linux distribution. Additionally, we fixed a memory leak and updated the port to gRPC version 1.28.1 and protobuf version 3.11.2.
Removal of orphaned 3rd-party ports
The dde_zircon device-driver environment was added in 18.08 as an experiment for executing device drivers of Google's Fuchsia OS as Genode components. However, since the initial import of the feature, it remained unused and received no further development. As Fuchsia largely diverged from the APIs implemented by dde_zircon in the meantime, we decided to remove the feature.
Sculpt OS improvements
The Genode-based Sculpt operating system has been adapted to the new Genode version without major user-visible changes. Given the fact that this release turned the low-level GUI stack upside down (Section The GUI stack, restacked), this must be read as good news. The GUI-stack changes have several nice side effects:
-
The elimination of color-space conversions in the pixel-data path has noticeably improved the interactive latency. Sculpt OS has never been as snappy as now.
-
As Sculpt's base system no longer depends on the successful initialization of the framebuffer and user-input devices, the administrative user interface can be started even before the low-level drivers are ready, increasing the parallelism at boot time. Yes, Sculpt OS boots even faster now.
-
The now ubiquitous use of 32-bit pixels throughout the whole GUI stack has largely eliminated the need for dithering, thereby improving the visual clarity of the user interface. Dithering remains in use in some situations though. In particular to reduce quantization artifacts for the alpha channel of the leitzentrale overlay. But that is a feature now, not a limitation.
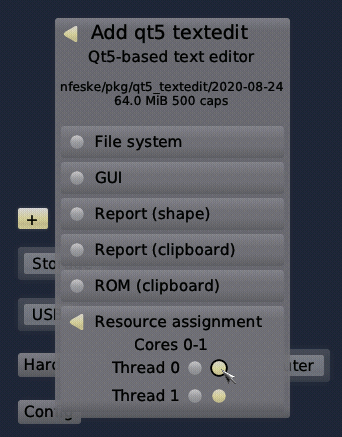
Interactive CPU affinity configuration
The component-configuration dialog gained the new ability to restrict the component to a subset of CPUs. This option is available under the new "Resource assignment" sub menu.
|
The configuration dialog shows a matrix of CPU cores where the x-axis denotes the physical cores and the y-axis the hyperthreads. By default, all available CPU cores are selected. The user can toggle the nodes by clicking on them. The dialog ensures that the selection is always a rectangular area. So one click may affect nodes other than only the clicked one.
Fail-safe handling of unsupported partition tables
Sculpt now uses Genode's heartbeat-monitoring mechanism to detect the failure of part_block instances during storage discovery. This situation can happen when a storage device contains an unsupported partitioning-table format. In this case or other error cases, the discovery would fail to complete. The new version of Sculpt responds to this situation by removing the unresponsive part_block instance automatically, releasing the corresponding device. This leaves the device available for alternative uses, e.g., for assigning it to a virtual machine.