
Release notes for the Genode OS Framework 20.11
With Genode 20.11, we focused on the scalability of real-world application workloads, and nurtured Genode's support for 64-bit ARM hardware. We thereby follow the overarching goal to run highly sophisticated Genode-based systems on devices of various form factors.
When speaking of real-world workloads, we acknowledge that we cannot always know the exact behavior of applications. The system must deal gracefully with many unknowns: The roles and CPU intensity of threads, the interplay of application code with I/O, memory-pressure situations, or the sudden fragility of otherwise very useful code. The worst case must always be anticipated. In traditional operating systems, this implies that the OS kernel needs to be aware of certain behavioral patterns of the applications, and has to take decisions based on heuristics. Think of CPU scheduling, load balancing among CPU cores, driving power-saving features of the hardware, memory swapping, caching, and responding to near-fatal situations like OOM.
Genode allows us to move such complex heuristics outside the kernel into dedicated components. Our new CPU balancer described in Section CPU-load balancing is a living poster child of our approach. With this optional component, a part of a Genode system can be subjected to a CPU-load balancing policy of arbitrary complexity without affecting the quality of service of unrelated components, and without polluting the OS kernel with complexity.
A second aspect of real-world workloads is that they are usually not designed for Genode. To accommodate the wealth of time tested applications, we need to bridge the massive gap between APIs of olde (think of POSIX) and Genode's clean-slate interfaces. Section Streamlined ioctl handling in the C runtime / VFS shows how the current release leverages our novel VFS concept for the emulation of traditional ioctl-based interfaces. So useful existing applications come to live without compromising the architectural benefits of Genode.
Platform-wise, the new release continues our mission to host Genode-based systems such as Sculpt OS on 64-bit ARM hardware. This work entails intensive development of device drivers and the overall driver architecture. Section Sculpt OS on 64-bit ARM hardware (i.MX8 EVK) reports on the achievement of bringing Sculpt to 64-bit i.MX8 hardware. This line of work goes almost hand in hand with the improvements of our custom virtual machine monitor for ARM as outlined in Section Multicore virtualization on ARM.
CPU-load balancing
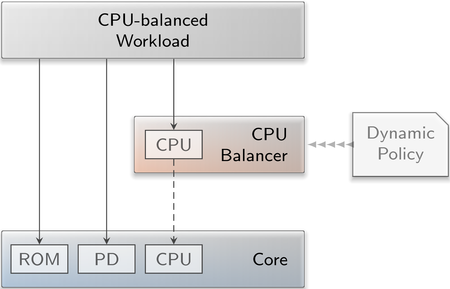
Migrating load over CPUs may be desirable in dynamic scenarios, where the workload is not known in advance or too complex. For example, in case of POSIX software ported to Genode, amount and roles of threads and processes can generally not planned for. With the current release, we add an optional CPU service designated for such dynamic scenarios. The new component called CPU balancer is able to monitor threads and their utilization behaviour. Depending on configured policies, the balancer can instruct Genode's core via the CPU session interface to migrate threads between CPUs.
|
|
The CPU balancer intercepts the interaction of a Genode subsystem (workload) with core's low-level CPU service.
|
This feature requires a kernel that supports thread migration, which are Fiasco.OC, seL4, and to some degree the NOVA kernel. For the NOVA kernel, solely threads with an attached scheduling context can be migrated, which are Genode::Thread and POSIX pthread instances. Genode's entrypoint and virtual CPU instances are not supported.
The feature can be tested by the scenario located at repos/os/run/cpu_balancer.run. Further information regarding policy configuration, a demo integration into Sculpt 20.08, and a screencast video are available as a dedicated CPU balancer article.
Sculpt OS on 64-bit ARM hardware (i.MX8 EVK)
Within the last year, a lot of effort was put into Genode's support for ARM 64-bit hardware. A consequent next step was to port Sculpt OS to the i.MX8 EVK board, which we have used so far as reference platform. With the current release, we proudly present the first incarnation of Sculpt OS for this board.
In contrast to the original x86 PC variant, this first ARM version ships with a static set of devices inside the drivers subsystem. No device manager component probes for the used hardware and starts drivers on demand. Instead, the set of drivers defined in the drivers_managed-imx8q_evk package enables USB HID devices to make use of mouse and keyboard peripherals connected to the board. It drives the SD-card, which can be used as storage back end for Genode's depot package management. Finally, it contains drivers to manage the display engine and the platform's device resources.
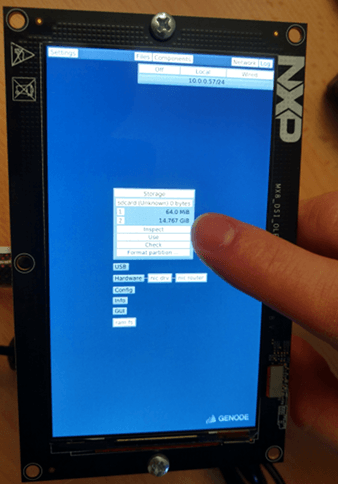
With Sculpt OS for ARM 64-bit, we not only aim for classical desktop/notebook systems - like on x86 - but also for embedded consumer hardware like phones and tablets. In order to leverage this goal, we enabled support for NXP's MX8_DSI_OLED1 display on the i.MX8 platform on Genode. The panel features an OLED display as well as a Synaptics RMI4 compliant touch screen.
Genode's i.MX8 display driver that we released with version 20.02 supported HDMI devices only, whereas the OLED display is connected via MIPI DSI to the SoC. Therefore, we extended the display driver by the MIPI DSI infrastructure as well as the actual driver for the OLED display. This endeavor turned out to be a very rocky one, which we have documented in detail on our Genodians website.
|
|
The administrative user interface of Sculpt OS responds to touch input.
|
In order to enable the touch screen device, we implemented a new Genode component from scratch. The touch screen is connected via an I2C bus to the SoC where data can be sent to and received from. At the moment, the I2C implementation is hidden within the driver but as more devices require I2C access, it will eventually become a standalone component. Interrupts are delivered via GPIO pins from the touch screen to the SoC, which made it necessary to enable i.MX8 support within Genode's generic i.MX GPIO driver. We took this as an opportunity to streamline, cleanup, and make the driver more robust. Additionally, all driver components now take advantage of the new platform driver API for ARM that has been introduced with release 20.05.
In its current incarnation, the driver for the display management is not able to switch in between HDMI or MIPI-DSI connected displays dynamically. Therefore, the display to be used in Sculpt has to be configured in the framebuffer configuration manually. By default the HDMI connector is used.
Beyond the driver subsystem, there are few components dependent on the actual hardware, which is why the look & feel of the Sculpt desktop does not actually differ from the x86 PC version, with the following exceptions:
When you select the network configuration dialog, you'll have no "Wifi" option because of the missing hardware. However, the "Wired" option allows you to start the corresponding driver for the i.MX FEC Ethernet device. The second difference to the Sculpt OS x86 PC variant is the absence of a virtual machine solution at the moment. Although Genode comprises a mature virtual-machine-monitor solution for ARM - see Section Multicore virtualization on ARM - it still lacks a reasonable storage back end. Therefore, we left virtualization out of the picture for now. Lastly, there is no possibility to use USB block devices, because the required management component - a driver manager for i.MX8 - does not exist yet. We plan to bridge these remaining few gaps compared to the x86 version with the upcoming Genode releases.
To give Sculpt a try on the i.MX8 EVK board, you have to start the well-known Sculpt run-script as usual, but for the base-hw kernel. For example:
tool/create_builddir arm_v8a cd build/arm_v8a make run/sculpt KERNEL=hw BOARD=imx8q_evk
Under the hood, the run script requests a sculpt-<board> specific package from the depot package system. Currently, sculpt-pc and sculpt-imx8q_evk are available.
Multicore virtualization on ARM
The written-from-scratch virtualization solution for Genode on ARMv8 entered the picture exactly one year ago with release 19.11. Since then, a couple of improvements and validations have been incorporated into it. Support for VirtIO network and console models had been added. Moreover, it got streamlined with our prior existing ARMv7 hypervisor and virtual-machine monitor (VMM). But although the architecture of the VMM was designed from the very beginning with more than one virtual-CPU (VCPU) in mind, running a VM on multiple cores had not been addressed nor tested.
With this release, we enhance the virtualization support of the base-hw kernel, acting as the ARM hypervisor, to support multicore virtual machines. The VMM implementation got extended to start an entrypoint for each VCPU owned by a VM. The affinities of those entrypoints are configured to distribute over all physical CPUs available to the VMM. The affinity of an entrypoint that handles events of a VCPU is automatically used as the affinity of the VCPU itself. Whenever a VCPU exit needs to be handled, this is delegated to the VMM entrypoint running on the same CPU. Once the VMM's entrypoint successfully handled the exit reason, it resumes the VCPU.
Formerly, the control to start or stop a VCPU was implemented by core's VM service that runs on the first CPU. But that implied that all different VMM entrypoints running on distinct CPUs would have needed to frequently call core's service entrypoint on the first CPU, inducing costly cross-CPU communication. This is amplified by the fact that core's entrypoint uses a system call to instruct the kernel's internal scheduler of the corresponding target CPU, which again would potentially target a remote CPU. For simplifying the implementation and for improving performance, we slightly extended the VM-session interface to return a kernel-specific capability addressing a VCPU directly. With this capability, a VMM's entrypoint is able to directly call the kernel to start or stop a VCPU instead of using the indirection over core. However, the detail whether the kernel is called directly or not is hidden behind the VM session client API and transparent to the user.
Base framework and OS-level infrastructure
C runtime
We improved the support for aligned memory allocations to fix sporadic memory leaks, which occurred with our port of the Falkon web browser. One relevant change is the implementation of the posix_memalign() function, another change is that the address alignment of anonymous mmap() allocations is now configurable like follows:
<config>
<libc>
<mmap align_log2="21"/>
</libc>
</config>
Standard C++ library
Even though Genode uses C++ as its primary programming language, we do not rely on or make use of any C++ standard library within the Genode OS framework. However, since a C++ STL is a vital part of application programming with C++, we provide one for applications built on top of the base framework; in particular the GNU C++ STL library (libstdc++). It is treated as a regular 3rd party library and its functionality is extended on demand. This approach worked well enough to even enable larger C++-based software like Qt5 and Chromium's Blink engine (as part of QtWebEngine) to run on Genode. That being said, for developers using libstdc++ on Genode, it is not immediately clear, which features are supported and which are not.
Fortunately, libstdc++ includes a testsuite that - as the name suggests - allows for testing the range of functionality of the library on a given platform. So we turned to it to establish a base line of supported features. We were particularly interested in how our port behaves when C++17 is requested. It goes without saying that this only includes the aspects, which are specifically probed by the testsuite. Rather than adding thorough Genode support to the testsuite, we opted for providing an environment that mimics the common unix target and allows us to execute the testsuite on the Linux version of Genode via a regular Linux host OS. It uses the Genode tool chain to compile the tests and spawns a Genode base-linux system to execute them.
Executing the testsuite was an iterative process because in the beginning, we encountered many falsely failed tests. On one hand, most of them were due to the way C++ is applied in Genode or rather how our build system works internally. For one, libsupc++ on Genode is part of the cxx library. This library in turn is part of ldso.lib.so, the dynamic linker that provides the base API. As the build system uses stub libraries generated from symbol files containing the ABI of a given shared object, each missing symbol must be made available. Otherwise the linking step is going to fail complaining about undefined references because components use these stub libraries during compilation. On the other hand, we had to get cozy with the testsuite's underlying test framework in order to get our test environment straight.
In case of the testsuite, there were a lot of symbols missing because we did not encounter them so far in our workloads, and thus, were not part of the symbols file. After all, templates will always generate specific symbols that are difficult to foresee. Besides that, we lacked support for aligned new and delete operators. With these adaptions in place, we were able to successfully execute the testsuite.
In the end, the results paint a good picture. The current short-comings boil down to
-
Support for the stdc++fs library is not available as the library is not ported yet.
-
Proper locale support in the libc as well as stdc++ is not available.
-
Support for parallel operations with openmp is not available.
-
Various subsystems (std::thread, std::random_device, numerics library) need further attention for proper functionality. This is most prominent for the failing execution tests where sometimes the threads appear to get stuck.
These findings are documented at issue 3925.
Consistent Block Encrypter (CBE)
The CBE is a library for the management of encrypted block-devices that is entirely written in SPARK. It was first announced and integrated with Genode 19.11, reached feature-completeness with Genode 20.05, and has received a highly modular back-end system with version 20.08. For this release, we thoroughly streamlined the CBE repository, added enhanced automated quality assurance, and switched to another default encryption back end.
Repository restructuring
Generally speaking, the CBE repository has been freed from everything that is not either part of the SPARK-based core logic (cbe, cbe_common, and the hashing algorithm), the essential SPARK-based tooling (initialization, checking), or the Ada-based C++ bindings (*_cxx libraries). The whole Genode-specific integration, testing, and packaging moved to Genode's gems repository and the former Genode sub-repository cbe was replaced by the new CBE port gems/ports/cbe.port. We also took the opportunity to remove many unused remnants of earlier development stages and to drastically simplify the ecosystem of CBE-related packages.
We hope that this allows for certain characteristics of the CBE project, like its strong OS-independence or a completely "flow-mode"-provable core logic to become more clear, while at the same time, the Genode-specific accessories can benefit from being part of Genode's mainline development.
Automated testing, benchmarking, and proving
The CBE tester is a scriptable environment meant for testing all aspects of the CBE library and its basic tooling. Through its XML command interface, one can not only access and validate data of CBE devices but also initialize them, check their consistency, analyze their meta data, execute performance benchmarks, manage device snapshots, perform online re-keying or online re-dimensioning of devices, and, last but not least, manage the required Trust Anchors.
Before this release, the CBE tester was a mere patchwork solution and many of the above mentioned features were limited or even missing. For instance block access was issued only in a synchronous fashion, the Trust-Anchor was managed implicitly, and validating read data wasn't possible. Besides adding the missing features, we also reworked the component entirely to follow a clean and comprehensible implementation concept. The new CBE tester comes together with the run script gems/run/cbe_tester.run that shall serve as both a demonstration how to use the tester and an extensive automated test and benchmark for the CBE.
Furthermore, we created the CBE-specific autopilot tool tool/cbe_autopilot that is meant to establish a common reference for the quality of CBE releases as well as for their integration in Genode. Running the tool without arguments will give instructions how to use it. In a nutshell, when running tool/cbe_autopilot basics, the tool will GNAT-prove what is expected to be provable, run all CBE-related run scripts expected to work, and build all CBE-related packages (existing build and depot directories are not touched in this process). The idea is to make the successful execution of the test mandatory before advancing the master branch of the CBE repository or releasing a new version of the integration in Genode. A handy side-feature of the tool is that one can run tool/cbe_autopilot prove to do only the GNAT-proving part. With tool/cbe_autopilot clean finally, the tool cleans up all of its artifacts.
Libcrypto back end for block encryption
The introduction of VFS plugins for CBE back ends in the previous Genode release made it much easier to interchange concrete implementations. This motivated us to play around a bit in our endeavour of optimizing execution time. It turned out that especially the choice of the block-encryption back end has a significant impact on the overall performance of CBE block operations. It furthermore seemed that especially the libsparkcrypto library, our former default for block encryption, prioritizes other qualities over performance.
That said, in general, we want to enable an informed user to decide for him- or herself which qualities one prefers in such an algorithm. The VFS plugin mechanism pays tribute to this. And it also seems very natural to us to combine a SPARK-based block-device management with a SPARK-based encryption back-end like libsparkcrypto. But for our default use case, we came to the conclusion that the libcrypto library might be a better choice.
Streamlined ioctl handling in the C runtime / VFS
The Genode release 19.11 introduced the emulation of ioctl operations via pseudo files. This feature was first used by the Terminal. With the current release, we further employ this mechanism for additional ioctl operations, like the block-device related I/O controls, as the long-term plan is to remove the notion of ioctl's from the Vfs::File_io_services API all-together.
We therefore equipped the block VFS-plugin with a compound directory hosting the pseudo files for triggering device operations:
- info
-
This file contains the device information structured as block XML node having size and count attributes providing the used block size as well as the total number of blocks.
- block_count
-
contains the total number of blocks.
- block_size
-
contains the size of one block in bytes.
Furthermore, we split the existing ioctl handling method in the libc into specific ones for dealing with terminals and block devices because at some point more different groups of I/O controls are to follow.
The first one to follow is the SNDCTL group. This group deals with audio devices and corresponds to the standard set by the OpenSoundSystem (OSS) specification years ago. In the same vein as the terminal and block I/O controls, the sound controls are implemented via property files.
The controls currently implemented are the ones used by the OSS-output plugin of cmus, the driving factor behind the implementation, which uses the (obsolete) version 3 API.
At the moment, it is not possible to set or rather change any parameters. In case the requested setting differs from the parameters of the underlying audio-out session - in contrast to the suggestion in the OSS manual - we do not silently adjust the parameters returned to the callee but let the I/O control operation fail.
The following list contains the currently handled SNDCTL I/O controls:
- SNDCTL_DSP_CHANNELS
-
sets the number of channels. We return the available channels here and return ENOTSUP if it differs from the requested number of channels.
- SNDCTL_DSP_GETOSPACE
-
returns the amount of playback data that can be written without blocking. For now it amounts the space left in the stream buffer of the audio-out session.
- SNDCTL_DSP_POST
-
forces playback to start. We do nothing and return success.
- SNDCTL_DSP_RESET
-
is supposed to reset the device when it is active before any parameters are changed. We do nothing and return success.
- SNDCTL_DSP_SAMPLESIZE
-
sets the sample size. We return the sample size of the underlying audio-out session and return ENOTSUP if it differs from the requested format.
- SNDCTL_DSP_SETFRAGMENT
-
sets the buffer size hint. We ignore the hint and return success.
- SNDCTL_DSP_SPEED
-
sets the sample rate. For now, we always return the rate of the underlying audio out session and return ENOTSUP if it differs from the requested one.
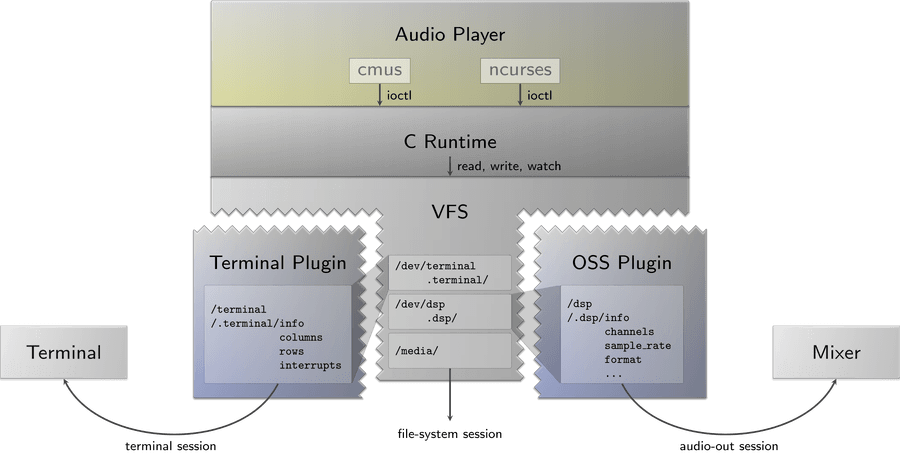
The libc extension is accompanied by an OSS VFS plugin that gives access to an audio-out session by roughly implementing an OSS pseudo-device. It merely wraps the session and does not provide any form of resampling or re-coding of the audio stream.
|
Image 3 depicts how the various pieces work together in a real-world scenario. The interplay of the extended libc with the OSS VFS plugin allows for listening to MP3s - for the time being the format is restricted to 44.1kHz/16bit - on Sculpt using the cmus audio player.
The current state serves as a starting point for further implementing the OSS API to cover more use cases, especially with ported POSIX software like VirtualBox and Qt5 or even as SDL2 audio back end. While showing its age, OSS is still supported by the majority of middle ware and makes for a decent experimentation target.
Device drivers
VirtIO support
Thanks to the remarkable contribution by Piotr Tworek, the Genode OS framework has become able to drive VirtIO network devices.
He did not only provide a single VirtIO network driver but a framework to easily add more VirtIO driver classes in the future. Either the devices are connected as PCI devices or directly as platform devices with fixed memory-mapped I/O addresses. The framework supports both and abstracts away from the concrete connection type.
The VirtIO network driver enables networking for Genode when using the virt_qemu board on either the ARMv7a or ARMv8a architecture. However, the VirtIO device configuration on Qemu is dynamic. The order and presence of different command line switches affect the bus address and interrupt assignment of each device. To make the use of Genode with Qemu robust in changing environments, a tiny helper component was supplemented. This component named virtdev_rom probes the memory-mapped I/O areas of the system bus and detects available and known VirtIO devices. The results are provided in the form of a configuration that can be consumed by the platform driver to assign the correct device resources to the corresponding VirtIO driver.
The VirtIO network driver in action, as well as the interplay of the platform driver and the virtdev_rom component can be observed when using the drivers_nic-virt_qemu package.
Improved support for OpenBSD audio drivers
So far, the supported drivers exclusively used PCI as transport bus and for practical reasons, the emulation environment was tied to it. The bus handling has now moved into its own compilation unit to make future addition of drivers that employ other transport buses easier. On the same account, the component got renamed to pci_audio_drv to reflect its bus connection.
While at it, the execution flow of the component got adapted. The kernel code should have been executed within the context of the main task like it is done in the DDE Linux drivers. The initial port of the HDA driver, however, called the code directly from within the session as there was no immediate reason to use a task context because suspending the execution was not needed. When using USB devices, that is no longer possible as we have to suspend the execution during the execution of the kernel code. So we pass in the audio data and schedule the emulated BSD kernel code.
The above mentioned changes are mostly preliminary clean-up work for the upcoming support of USB audio devices.
Furthermore, we implemented timeout handling in the driver and use Genode's timeout framework API to schedule timeouts and for providing the current time. For now there is only one timeout - the unsolicited Azalia codec event - and therefore the timeout queue consists of solely one timeout object. Those events are important for detecting plugged in headphones.
Supporting headphones was further refined by accounting for the situation where the driver is started while headphones are already plugged in and the mixer needs to be configured accordingly. In particular, on the Fujitsu S938 the driver lacked the proper quirk for switching between the internal and external microphone.
In addition to the changes made to the audio driver component, the behaviour of the audio mixer was adjusted with regard to handling the configuration of a new session. The mixer now applies the settings already stored in its configuration to new sessions instead of only reporting them. In case of Sculpt, where an existing launcher already contains a valid configuration, that allows for setting the volume levels appropriately for known sessions prior to establishing the connection.
Retiring the monolithic USB driver
With release 18.08, a componentized USB stack got introduced next to our time-tested monolithic USB driver. With the current release, the driver manager as used by Sculpt OS switched to use the new USB stack in order to benefit from the de-composition and from more supported USB devices. The monolithic driver was still based on an older DDE-Linux revision compared to the componentized version. This step paves the ground to retire the monolithic USB driver with the next Genode release and will improve the number of supported USB devices with the upcoming Sculpt OS release.
Platforms
Hardware P-State support on PC hardware
Intel CPUs feature Speed Shift respectively Hardware P-State (HWP) functionality in order to balance CPU frequency and voltage for performance and power efficiency. Up to now, the UEFI firmware of the notebooks we worked with selected or made an option selectable in the UEFI configuration to specify the desired behaviour, e.g. optimize for performance or power efficiency.
With a recent Lenovo notebook, however, we faced the issue that either the fan would run for too long after some load and/or the performance of the CPUs regressed. Finding a well working sweet spot seems hard. This experience prompted us to investigate how the Intel HWP feature can be set and configured. After some experiments, we achieved to reduce the fan noise and received better performance by tweaking the Intel HWP settings.
However, changing the Intel HWP settings requires access to the privileged mode on all available CPUs. Since Genode supports several kernels, a solution would require us to modify all kernels or the feature would remain solely available to one kernel. We went for a different approach.
On x86, we use the tools from the Morbo project, e.g., bender and microcode, to run code before the kernels are booted. The jobs of the tools are to scan, enable, or apply changes to the CPUs and chipset, which are not required to change during runtime. We came to the conclusion that the named bootstrap tools are good places to apply such one-time Intel HWP settings for the moment.
During the course of adding the Intel HWP functionality, we merged the microcode functionality into the bender tool and made it configurable via the boot options microcode and intel_hwp. A typical generated grub2 configuration by using both options would look like this:
When using the NOVA kernel and Genode's run tool for booting respectively disk-image creation, one may use the existing options_bender variable in tool/run/boot/nova. The microcode option is added by setting the apply_microcode flag in the same file. The intel_hwp option, at the other hand, can simply be appended to options_bender. On startup, bender will print the applied HWP settings for each core to the serial output if the intel_hwp option was set. The new feature will try to set Intel HWP to PERFORMANCE mode, the mode for which we observed the best results.
NOVA microhypervisor
The IO-MMU is a hardware feature to protect operating systems, e.g., Genode, against misbehaving devices and/or corresponding device drivers. The feature is supported on x86 since the 13.02 release and described in the release notes. Up to now, this feature is solely supported for Intel hardware, in particular CPUs and chipsets supporting Intel VT-d.
With the current release, we add support for AMD's IO-MMU variant to the Genode framework for the NOVA kernel - being the first one out of the supported microkernels. Being conceptionally equivalent, the actual implementation for AMD differs from Intel unsurprisingly. In order to add the support, a new IO-MMU interface abstraction for accommodating both versions - Intel and AMD - has been added to the NOVA kernel. Further, the discovery of the available AMD IO-MMUs required the traversal of different ACPI tables than for Intel and another page table format for the IO-MMU had to be added. On the Genode framework side, only very few changes were necessary, namely the detection of the IO-MMU feature by parsing the ACPI tables in Genode's ACPI driver as well as the ported Intel ACPICA component.
The change has been already successfully tested on various Ryzen desktops and notebooks on a backported Sculpt 20.08 branch.