
Release notes for the Genode OS Framework 17.08
The flagship feature of Genode 17.08 has been in the works for more than a year: The support for hardware-accelerated graphics on Intel Gen-8 GPUs. This is an especially challenging topic because it is riddled with terminology, involves highly complex software stacks, carries a twisted history with it, and remains to be a moving target. It took up a lot of patience to build up a profound understanding of the existing driver architectures and the mechanisms offered by modern graphics hardware. On the other hand, with the proliferation of hardware-based sandboxing features like virtual GPU memory and hardware contexts, we found that now is the perfect time for a clean-slate design of a microkernelized GPU driver. Section Hardware-accelerated graphics for Intel Gen-8 GPUs introduces this work, which includes our new GPU multiplexer as well as the integration with the client-side Mesa protocol stack.
The second focus of the current release is the extension of Genode's supported base platforms. Most prominently, we upgrade the seL4 kernel to version 6.0 while extending the architecture support from 32-bit x86 to ARM and 64-bit x86 (Section The seL4 kernel on ARM and 64-bit x86 hardware). To bring Genode closer to cloud-computing scenarios, we added basic support for executing Genode scenarios as Xen DomU domains (Section Genode as Xen DomU). Furthermore, the Muen separation kernel has been updated to a current version. As a cross-kernel effort, there is work under way to boot Genode-based systems via UEFI, currently addressing the NOVA, base-hw, and seL4 kernels.
Among the many other functional additions are a new VFS plugin for accessing FAT file systems, new components like sequence and fs_report that aid new system compositions, and our evolving custom package-management infrastructure.
Hardware-accelerated graphics for Intel Gen-8 GPUs
The ability to leverage hardware-accelerated graphics is generally taken for granted in modern commodity operating systems. The user experience of modern desktop environments, web-browser performance, and obviously games depend on it. On the other hand, the benefit of hardware-accelerated graphics comes at the expense of tremendous added complexity in the lower software stack, in particular in system components that need to be ultimately trusted. For example, with circa 100 thousand lines of code, the Intel GPU driver in the Linux kernel is an order of magnitude more complex than a complete modern microkernel. In a monolithic-kernel-based system, this complexity is generally neglected because the kernel is complex anyway. But in microkernel-based scenarios optimized for a trusted computing base in the order of a few ten thousand lines of code, it becomes unacceptable. Fortunately, recent generations of graphics hardware provide a number of hardware features that promise to solve this conflict, which prompted us to investigate the use of these features for Genode.
During this year's Hack'n'Hike event, we ported the ioquake3 engine to Genode. As preliminary requirement, we had to resurrect OpenGL support in our aging graphics stack and enable support for current Intel HD Graphics devices (IGD). We started by updating Mesa from the old 7.8.x to a more recent 11.2.2 release. Since we focused mainly on supporting Intel devices, we dropped support for the Gallium back end as Intel still uses the old DRI infrastructure. This decision, however, also influenced the choice of the software rendering back end. Rather than retaining the softpipe implementation, we now use swrast. In addition, we changed the available OpenGL implementation from OpenGL ES 2.x to the fully fledged OpenGL 4.5 profile, including the corresponding shader language version. As with the previous Mesa port, EGL serves as front end API for system integration and loads a DRI back-end driver (i965 or swrast). EGL always requests the back-end driver egl_drv.lib.so in form of a shared object. Genode's relabeling features are used to select the proper back end via a route configuration. The following snippet illustrates such a configuration for software rendering:
<start name="gears" caps="200">
<resource name="RAM" quantum="32M"/>"
<route>
<service name="ROM" label="egl_drv.lib.so">
<parent label="egl_swrast.lib.so"/>
</service>
<any-service> <parent/> <any-child/> </any-service>
</route>
</start>
With the graphics-stack front end in place, it was time to take care of the GPU driver. In our case this meant implementing the DRM interface in our ported version of the Intel i915 DRM driver. Up to now, this driver was solely used for mode setting while we completely omitted supporting the render engine.

|
With this new and adapted software stack, we successfully could play ioquake3 on top of Genode with a reasonable performance in 1080p on a Thinkpad X250.
During this work, we gathered valuable insights into the architecture of a modern 3D-graphics software stack as well as into recent Intel HD Graphics hardware. We found that the Intel-specific Mesa driver itself is far more complex than its kernel counter part. The DRM driver is mainly concerned with resource and execution management whereas the Mesa driver programs the GPU. For example, amongst others, Mesa compiles the OpenGL shaders into a GPU-specific machine code that is passed on to the kernel for execution.
While inspecting the DRM driver, it became obvious that one of the reasons for its complexity is the need to support a variety of different HD Graphics generations as well as different features driven by software-usage patterns. For our security related use cases, it is important to offer a clear isolation and separation mechanism per client. Hardware features provided by modern Intel GPUs like per-process graphics translation tables (PPGTT) and hardware contexts that are unique for each client make it possible to fulfill these requirements.
By focusing on this particular feature set and thus limiting the supported hardware generations, the development of a maintainable GPU multiplexer for Genode became feasible. After all, we strive to keep all Genode components as low complex as possible, especially resource multiplexers like such a GPU multiplexer.
|
|
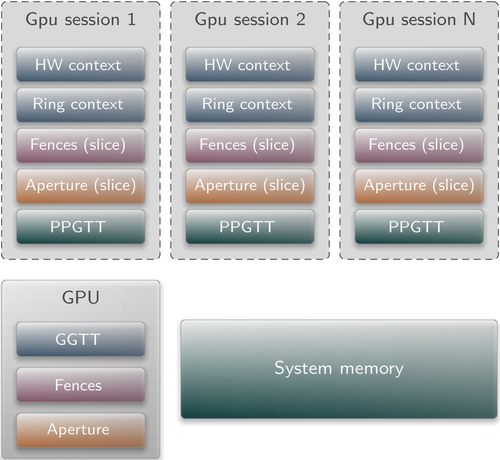
This image shows multiple GPU-session clients and the resources they are using. The fence registers as well as the aperture is partitioned between them, the PPGTT is backed by the system memory, and the contexts are located in disjoint GGTT regions.
|
Within four months, we implemented an experimental GPU multiplexer for Intel HD Graphics Gen8 (Broadwell class) devices. We started out defining a GPU session interface that is sufficient to implement the API used by the DRM library. For each session, the driver creates a context consisting of a hardware context, a set of page tables (PPGTT), and a part of the aperture. The client may use the session to allocate and map memory buffers used by the GPU. Each buffer is always eagerly mapped 1:1 into the PPGTT by using the local virtual address of the client. Special memory buffers like an image buffer are additionally mapped through the aperture to make use of the hardware-provided de-tiling mechanism. As is essential in Genode components, the client must donate all resources that the driver might need to fulfill the request, i.e., quota for memory and capability allocations. Clients may request the execution of their workload by submitting an execution buffer. The GPU multiplexer will then enqueue the request and schedule all pending requests sequentially. Once the request is completed, the client is notified via a completion signal.
|
|
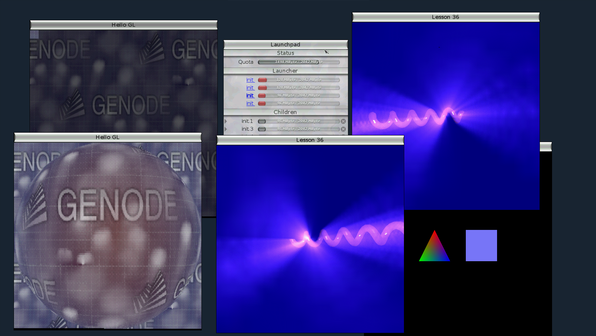
Example scenario of multiple OpenGL programs that use the new GPU multiplexer for hardware-accelerated rendering.
|
We consider this first version of the GPU driver as experimental. As of now, it only manages the render engine of the GPU. Mode-setting or rather display handling must be performed by another component. Currently, the VESA driver is used for this purpose. It also lacks any power-management functionality and permanently keeps the GPU awake. Both limitations will be addressed in future releases and support for Gen9+ (Skylake) and newer devices might be added.
In its current incarnation, the GPU multiplexer component consists of about 4,200 lines of code whereas the Mesa DRI i965 driver complements the driver at the client side with about 78,000 lines of code.
The seL4 kernel on ARM and 64-bit x86 hardware
With the 16.08 release, we brought the seL4 support to a level to be considered being on par with the other supported kernels. At the time, Genode's use of seL4 was limited to 32-bit x86 platforms.
In the current release, we extend the platform support to ARM and 64-bit x86. We started this line of work with an incremental kernel upgrade from version 3.2.0 to 5.2.0 and finally to seL4 6.0. Through these upgrades, we were able to drop several Genode-specific seL4 patches, which were required in the 16.08 release. One major improvement of version 6.0 compared to earlier versions is the handling of device-memory announcements by the kernel to Genode's roottask core.
With the kernel update in place, we inspected the x86-specific part thoroughly while splitting and separating it properly into architecture-agnostic and architecture-dependent parts. Upon this work, we added the architecture-specific counterparts for x86_64 and ARM. One major work item was to make the page-table handling in Genode's core aware and generic enough to handle the different page-table sizes of the three architectures.
For the ARM support, we decided to enable the i.MX6 FreeScale based SoC, namely the Wandboard Quad board. Since the seL4 kernel interface provides no timeout support, we revived a user-level timer driver that we originally developed for our custom base-hw kernel: The so-called EPIT timer, which is part of most i.MX SoCs.
We finished the essential work for the mentioned three platforms in less time than expected and, thereby, had spare time to address additional features.
First, we enabled multiprocessor support for Genode/seL4 on x86 and thread-priority support for all seL4 platforms. Additionally, we were able to utilize the seL4 benchmark interface for Genode's trace infrastructure in order to obtain utilization information about threads and CPUs. The Genode components top (text-based) and cpu_load_monitor (graphical) are now usable on Genode/seL4. Finally, as we are currently exploring the support for booting various kernels via UEFI on x86, we took the chance to investigate the steps needed to boot seL4 via UEFI. UEFI firmware does not always provide a compatibility support module (CSM) for legacy BIOS boot support. Hence, we extended the seL4 kernel for Genode according to the Multiboot2 specification, which enables us to start Genode/seL4 together with GRUB2 - as an UEFI capable bootloader - on machines missing CSM support.
Base framework and OS-level infrastructure
Simplified IOMMU handling
When IOMMUs are used on x86, all host memory targeted via direct memory accesses (DMA) by devices must eagerly be registered in the respective I/O page table of the device. Up to now, Genode supports IOMMUs on NOVA only. On this kernel, a device protection domain is represented as a regular protection domain with its virtual memory layout being used for both the CPU's MMU and the device. Traditionally, mappings into such virtual memory spaces are inserted on demand as responses to page faults. However, as there are no page faults for DMA transactions, DMA buffers must always be eagerly mapped. The so-called device PD hid this gap for NOVA. In anticipation of adding IOMMU support for more kernels, we desired to generalize the device-PD mechanism by introducing an explicit way to trigger the insertion of DMA memory into the proper page tables.
We extended the PD-session interface by a map function, which takes a virtual memory region of the PD's virtual address space as argument. The page frames of the previously attached dataspaces are added eagerly by core to the IOMMU page-tables. With this explicit map support, we were able to replace the Genode/NOVA-specific device-PD implementation with a generic one, which will easily accommodate other kernels in the future.
New report server for capturing reports to files
The report session is a simple mechanism for components to publish structured data without the complexity of a file-system layer. In the simplest case, a client component will produce a report and communicate it directly to a component acting as a server. The disadvantage is that the report client becomes reliant on the liveliness and presence of the consumer component. So in the more robust case, the report_rom component acts as the server hosting the report service as well as a ROM service for components consuming reports.
The report_rom server permits ROM access only to clients matching an explicit configuration policy. This is good for security but opaque to a user. Reports can only be read where an explicit policy is in place and only a single report session can report to an active ROM session.
The new fs_report component is a friendlier and more flexible report server. Reports are written to a file system using a file and directory hierarchy that expresses session routing. This allows for intuitive report inspection and injection via a file system. When used with the ram_fs and fs_rom servers, it can also replicate the functionality of report_rom.
New runtime environment for starting components sequentially
The init component is a prime example of software with an emphasis on function over features. It is the fundamental building block for combining components yet its behavior is simple and without heuristics. Like other contemporary init managers, it starts components in parallel, but to a more extreme degree in that it has no concept of "runlevels" or "targets", all components are started as soon as possible. The concrete sequence of execution is instead determined by when server components make service announcements and how quickly they respond to client requests.
In some cases, the execution of one component must not occur until the execution of another component ends, be it that the first produces output that is consumed by the second, or that the two contend for a service that cannot be multiplexed. Init contains no provisions to enforce ordering. But we are free to define new behaviors in other management components.
The solution to the problem of ordering is the sequence component. Sequence walks a list of children and executes them in order, one at a time. With only one child active, there is no need for any local resource or routing management. By applying the same session label transformations as init, external routing and policy handling are unchanged.
An example of ordering a producer and consumer within an init configuration follows:
<start name="sequence">
<resource name="RAM" quantum="128M"/>
<config>
<start name="producer">
<config .. />
</start>
<start name="consumer">
<config .. />
</start>
</config>
<route>
<service name="LOG" label_prefix="producer">
<child name="log_a"/> </service>
<service name="LOG" label_prefix="consumer">
<child name="log_b"/> </service>
<any-service> <parent/> <any-child/> </any-service>
</route>
</start>
Support for boot-time initialized frame buffer
UEFI-based systems do not carry along legacy BIOS infrastructure, on which our generic VESA driver depends. Hence, when booting via UEFI, one has to use either a hardware-specific driver like our Intel-FB driver or - alternatively - facilitate generic UEFI mechanisms.
Instead of booting in VGA text mode and leaving the switch to a graphics mode (via real-mode SVGA BIOS subroutines) to the booted OS, UEFI employs the so-called graphics output protocol as a means to setup a reasonable default graphics mode prior booting the operating system. In order to produce graphical output, the operating system merely has to know the physical address and layout of the frame buffer. Genode's core exposes this information as the platform_info ROM module. The new fb_boot_drv driver picks up this information to provide a Genode framebuffer session interface. Hence, on UEFI-based systems, it can be used as a drop-in replacement for the VESA driver. In contrast to the VESA driver, however, it is not able to switch graphics modes at runtime.
The new component is located at os/src/drivers/framebuffer/boot/. Thanks to Johannes Kliemann for this contribution.
Extended non-blocking operation of the VFS
In version 17.02, we added support for non-blocking reads from the VFS in the form of the read_ready(), queue_read(), and complete_read() functions. Since then, it has become obvious that blocking within the VFS is not only problematic in the VFS server itself when multiple clients are connected, but also when the VFS is deployed in a multi-threaded environment and a VFS plugin needs to reliably wait for I/O-completion signals.
For this reason, we reworked the interface of the VFS even more towards non-blocking operation and adapted the existing users of the VFS accordingly.
The most important changes are:
-
Directories are now created and opened with the opendir() function and the directory entries are read with the queue_read() and complete_read() functions.
-
Symbolic links are now created and opened with the openlink() function and the link target is read with the queue_read() and complete_read() functions and written with the write() function.
-
The write() function does not wait for signals anymore. This can have the effect that data written by a VFS library user has not been processed by a file-system server when the library user asks for the size of the file or closes it (both done with RPC functions at the file-system server). For this reason, a user of the VFS library should request synchronization before calling stat() or close(). To make sure that a file-system server has processed all write request packets that a client submitted prior the synchronization request, synchronization is now requested at the file-system server with a synchronization packet instead of an RPC function. Because of this change, the synchronization interface of the VFS library has been split into the queue_sync() and complete_sync() functions.
Making block sessions read-only by default
Genode server components are expected to apply the safest and strictest behavior when exposing cross-component state or persistent data. In practice block and file-system servers only allow access to clients with explicitly configured local policies. The file-system servers enforce an additional provision that sessions are implicitly read-only unless overridden by policy. This release introduces a similar restriction to the AHCI driver and partition multiplexer. Clients of these servers require an affirmative writeable attribute on policies to permit the writing of blocks. Write permission at these servers may also be revoked by components that forward block-session requests by placing writeable="no" into session-request arguments.
All users of ahci_drv and part_blk are advised that this change may break existing configurations without explicit writeable policies.
Refined time handling
Release 17.05 introduced a new API for user-level timing named timeout framework. Together with this new framework came a comprehensive test that stresses all aspects of the interface. During the past few months, this test has turned out to be an enrichment for Genode far beyond its original scope. As the test significantly raised the standards in user-level timing, it also sharpened our view on the measurement precision of various timer drivers and timestamps, which act as input for the framework. This revealed several problems previously unidentified. For instance, we improved the accuracy and stability of the time values provided by the drivers for the Raspberry-Pi timer, the Cortex-A9 timer, the PIT, and the LAPIC. We also were able to further optimize the calibration of the TSC in the NOVA kernel.
Additionally, the test also helped us to refine the timeout framework itself. The initial calibration of the framework - that previously took about 1.5 seconds - is now performed much quicker. This makes microseconds-precise time available immediately after the timer connection switched to the modern fine-grained mode of operation, which is a prerequisite for hardware drivers that need such precision during their early initialization phase. The calculations inside the framework also became more flexible to better fit the characteristics of all the hardware and kernels Genode supports.
Finally, we were able to extend the application of the timeout framework. Most notably, our C runtime uses it as timing source to the benefit of all libc-using components. Another noteworthy case is the USB driver on the Raspberry Pi. It previously couldn't rely on the default Genode timing but required a local hardware timer to reach the precision that the host controller expected from software. With the timeout framework, this workaround could be removed from the driver.
FatFS-based VFS plugin
Genode has supported VFAT file-systems since the 9.11 release when the FatFS library was first ported. The 11.08 release fit the library into the libc plugin architecture and in 12.08 FatFS was used in the ffat_fs file-system server. Now, the 17.08 release revisits FatFS to mold the library into the newer and more flexible VFS plugin system. The vfs_fatfs plugin may be fitted into the VFS server or used directly by arbitrary components linked to the VFS library. As the collection of VFS plugins in combination with the VFS file-system server has a lower net maintenance cost than multiple file-system servers, the ffat_fs server will be retired in a future release.
Enhanced GUI primitives
Even though we consider Qt5 as the go-to solution for creating advanced graphical user interfaces on top of Genode, we also continue to explore an alternative approach that facilitates Genode's component architecture to an extreme degree. The so-called menu-view component takes an XML description of a dialog as input and produces rendered pixels as output. It also gives feedback to user input such as the hovered widget at a given pointer position. The menu view does not implement any application logic but is meant to be embedded as a child component into the actual application. This approach relieves the application from the complexity (and potential bugs) of widget rendering. It also reinforces a rigid separation of a view and its underlying data model.
The menu view was first introduced in version 14.11. The current release improves it in the following ways:
-
The new <float> widget aligns a child widget within a larger parent widget by specifying the boolean attributes north, south, east, and west. If none is specified, the child is centered. If opposite attributes are specified, the child is stretched.
-
A new <depgraph> widget arranges child widgets in the form of a dependency graph, which will be the cornerstone for Genode's upcoming interactive component-composition feature. As a prerequisite for implementing the depgraph widget, Genode's set of basic graphical primitives received new operations for drawing sub-pixel-accurate anti-aliased lines and bezier curves.
-
All geometric changes of the widget layout are animated now. This includes structural changes of the new <depgraph> widget.

|
The menu-view component is illustrated by the run script at gems/run/menu_view.run.
C runtime
The growing number of ported applications used on Genode is accompanied by the requirement of extensive POSIX compatibility of our C runtime. Therefore, we enhanced our implementation by half a dozen features (e.g., O_ACCMODE tracking) during the past release cycle. We thank the contributors of patches and test cases and will continue our efforts to accommodate more ported open-source components in the future.
Libraries and applications
Mesa adjustments
The Mesa update required the adaption of all components that use OpenGL. In particular that means the Qt5 framework. Furthermore, we also enabled OpenGL support in our SDL1 port.
As playground, there are a few OpenGL examples. The demos are located under repos/libports/src/test/mesa_demos, which use the EGLUT bindings. There are also some SDL based examples in the world repository under repos/world/src/test/sdl_opengl.
Package management
The previous release featured the initial version of Genode's custom package-management tools. Since then, we continued this line of work in three directions.
First, we refined the depot tools and the integration of the depot with our custom work-flow ("run") tool. One important refinement is a simplification of the depot's directory layout for library binaries. We found that the initial version implied unwelcome complexities down the road. Instead of placing library binaries in a directory named after their API, they are now placed directly in the architecture directory along with regular binaries.
Second, driven by the proliferated use of the depot by more and more run scripts, we enhanced the depot with new depot recipes as needed.
Third, we took the first steps to use the depot on-target. The experimentation with on-target depots is eased by the new create_tar_from_depot_binaries function of the run tool, which allows one to assemble a new depot in the form of a tar archive out of a subset of packages. Furthermore, the new depot_query component is able to scan an on-target depot for runtime descriptions and returns all the information needed to start a subsystem based on the depot content. The concept is exemplified by the new gems/run/depot_deploy.run script, which executes the "fs_report" test case supplied via a depot package.
Platforms
Genode as Xen DomU
We want to widen the application scope of Genode by enabling users to easily deploy Genode scenarios on Xen-based cloud platforms.
As a first step towards this goal, we enhanced our run tool to support running Genode scenarios as a local Xen DomU, managed from within the Genode build system on Linux running as Xen Dom0.
The Xen DomU runs in HVM mode (full virtualization) and loads Genode from an ISO image. Serial log output is printed to the text console and graphical output is shown in an SDL window.
To use this new target platform, the following run options should be defined in the build/x86_*/etc/build.conf file:
RUN_OPT = --include boot_dir/$(KERNEL) RUN_OPT += --include image/iso RUN_OPT += --include power_on/xen RUN_OPT += --include log/xen RUN_OPT += --include power_off/xen
The Xen DomU is managed using the xl command line tool and it is possible to add configuration options in the xen_args variable of a run script. Common options are:
-
Disabling the graphical output:
append xen_args { sdl="0" } -
Configuring a network device:
append xen_args { vif=\["model=e1000,mac=02:00:00:00:01:01,bridge=xenbr0"\] } -
Configuring USB input devices:
append xen_args { usbdevice=\["mouse","keyboard"\] }
Note that the xl tool requires super-user permissions. Interactive password input can be complicated in combination with expect and is not practical for automated tests. For this reason, the current implementation assumes that no password input is needed when running sudo xl, which can be achieved by creating a file /etc/sudoers.d/xl with the content
user ALL=(root) NOPASSWD: /usr/sbin/xl
where user is the Linux user name.
Execution on bare hardware (base-hw)
UEFI support
Analogously to our work on the seL4 and NOVA kernels in this release, we extended our base-hw kernel to become a Multiboot2 compliant kernel. When used together with GRUB2, it can be started on x86 UEFI machines missing legacy BIOS support (i.e., CSM).
RISC-V
With Genode version 17.05, we updated base-hw's RISC-V support to privileged ISA revision 1.9.1. Unfortunately, this implied that dynamic linking was not supported on the RISC-V architecture anymore. Since dynamic linking is now required for almost all Genode applications by default, this became a severe limitation. Therefore, we revisited our RISC-V implementation - in particular the kernel entry code - to lift the limitation of being able to execute only statically linked binaries.
Additionally, we integrated the Berkeley Boot Loader (BBL), which bootstraps the system and implements the machine mode, more closely into our build infrastructure. We also added a new timer implementation to base-hw by using the set timeout SBI call of BBL.
What still remains missing is proper FPU support. While we are building the Genode tool chain with soft float support, we still encounter occasions where FPU code is generated, which in turn triggers compile time errors. We will have to investigate this behavior more thoroughly, but ultimately we want to add FPU support for RISC-V to our kernel and enable hardware floating point in the tool chain.
Muen separation kernel
Besides updating the Muen port to the latest kernel version as of end of June, Muen has been added to Genode's automated testing infrastructure. This includes the revived support for VirtualBox 4 on top of this kernel.
NOVA microhypervisor
The current release extends NOVA to become a Multiboot2 compliant kernel. Used together with GRUB2, NOVA can now be started on x86 UEFI machines missing legacy BIOS support (called CSM).
GRUB2 provides the initial ACPI RSDP (Root System Description Pointer) to a Multiboot2 kernel. The RSDP contains vital information required to bootstrap the kernel and the operating system in general on today's x86 machines. To make this information available to the user-level ACPI and ACPICA drivers, the kernel propagates the RSDP to Genode's core, which - in turn - exposes it to the user land as part of the platform_info ROM module.
In order to ease the setup of an UEFI bootable image, we added a new image module to our run-tool infrastructure. The run option image/uefi can be used instead of image/iso in order to create a raw image that contains a EFI system partition in a GUID partition table (GPT). The image is equipped by the new image/uefi module with the GRUB2 boot loader, a GRUB2 configuration, and the corresponding Genode run scenario. The final image can be copied with dd to a bootable USB stick. Additionally, we added support to boot such an image on Qemu leveraging TianoCore's UEFI firmware.
As a side project, minor virtualization support for AMD has been added to Virtualbox 4 and to the NOVA kernel on Genode. This enables us to run a 32-bit Windows 7 VM on a 32-bit Genode/NOVA host on an (oldish) AMD Phenom II X4 test machine.